Back in 2011, Lynfield Drive was introduced to the VEX Forum.
It has two wheels in the traditional tank-drive configuration, and two wheels running perpendicular to them.
Being that it doesn’t require any non-90-degree angles nor any additional motors, I came to think that it should be an attractive option for the ability to strafe without the build-quality concern of x-drive nor the motor-opportunity-cost concern of h-drive.
Unlike an x-drive, it also leaves us with more space around the frontal area of the robot, which is nice.
It does, however, utilize only half of its motors while driving forward, backward, left, or right, which might put a Lynfield Drive at a disadvantage in terms of acceleration and pushing force.
What’s your opinion on Lynfield Drive, 9 years after it’s introduction to VEX Forum?
(Look at the generation that paved the way)
I think this is an interesting idea to look in to. A standard 4 wheels should mean they’re always contacting the floor, and you can get corner to corner support. Yes it does come at a cost of force and acceleration, but in a divided game like startstruck, or even a tower takeover protected zone it would be a great option where you would really only NEED 3 motors to have a full range of motion and extra space in the robot.
While I would not use this for change up, it should be drawn out in the design for a game with less contact.
I like this, and I can already imagine how it would go on our robot. I’m happy you brought this drive back to life, it’s reminded me that there’s more beyond the norm even if the norm works pretty darn good.
Summed up thoughts: “Nice idea, but maybe next year, depending on how it all plays out.”
I’ve never actually been to a Change Up competition, largely due to me living in South Korea where competitions are few and far between. Does robot-to-robot contact happen very frequently in a match?
Also, with live remote competition being a thing, wouldn’t the lack-of-force issue be less of a matter? I do see that the reduced acceleration would still have an impact, but the allegedly superior turning performance might make up for the time taken to accelerate.
I have one of these in our demo pool of robots. Well one VRC and one VIQ. Big upgrade is to add a third omni on the back so there are three points of contact. It makes the spin part more reliable on uneven floors
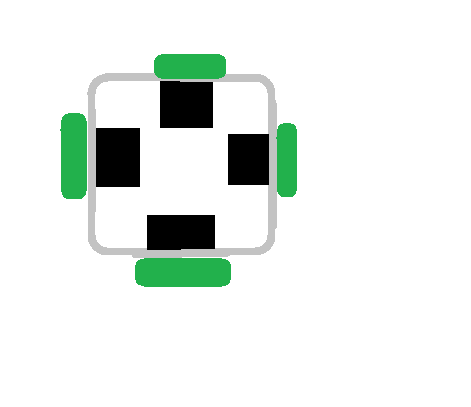
We actually had one of these on our TT towerbot, but we only had 4 omnis. It looked something like this:
Green are omnis, black are motors. The main advantage of a drive like this over an x-drive, however, is that its programming is more consistent, especially for autonomous. Instead of having 4 motors spinning, 2 of them spinning outwards and 2 spinning inwards, it has 2 pushing forwards, so they will get caught less easily.
The main problem with what we had was the front wheels tendency to get caught on a goal. I do not think that this would be a great idea for change up, as with most snailbots, there is an open space in the base for the ball to travel in. It would be hard to include this in a design like that.
like you said, the big problem is that you only use half the motors when moving linearly, which imo is an unacceptable limitation for this type of drive.
My team tried to build Lynfield Drive for Starstruck and we quickly abandoned that idea.
The problem was that in order to strafe (without turning the robot at the same time) you had to apply some counter-rotating force/power to the front wheels. But the amount of that power was very sensitive to the weight that the robot was carrying and the exact location of the center of mass.
For games where the amount and location of the game objects inside the robot is variable this makes it extremely annoying to control, because robot keeps turning while strafing and dynamically programming required corrections in software isn’t easy.
As far as I remember the only non 4-omni wheel tank drive robot that was competitive at the states that year was a somewhat slow mecanum base that had very reliable autonomous and programming skills.
We haven’t been to a competition yet, so we can’t say how much contact there really is. But we are prepared for robots looking to push us, especially to unalign us from the center and wall goals, and having a one motor Omni strafe in those moments wouldn’t be great to say the least.
On top of that we plan to disrupt robots a few times per match, so our own matches will have a little violence guaranteed.
I am confused about how the robot strafes when only the back is powered and not the front. Normally, it seems like this would just make the robot pivot. In the original thread linked in the OP, it said they used code to fix this issue. Also technik3k said
that he used counter-rotating force to the front wheels.
If the robot was strafing to the left, the front left wheel would be powered slowly backwards and the front right wheel would be powered slowly forwards.