I feel like VEXcode is more successful than PROS by the majority of individuals in VEX (although I admit more competitive individuals tend to use PROS more).
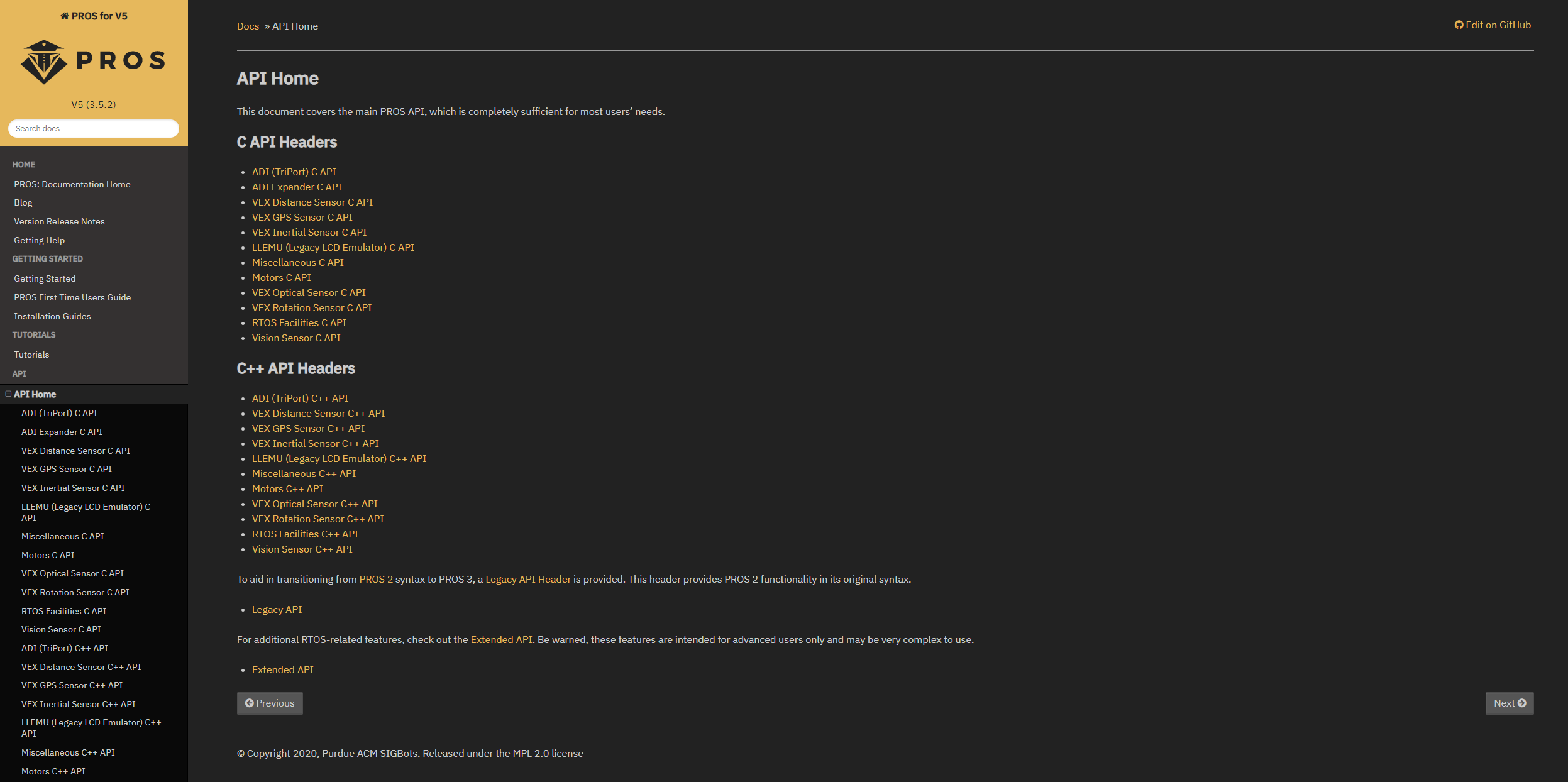
Looking at PROS API:
As you can see, you are presented with loads of places and information. That’s usual and nice, but I feel like much of what it offers seem unnecessary, or “fluffy”
What does all of these things mean? There’s no good detailed description, and no preview of a function. I feel like this is inconvenient from a newcomer’s standpoint.
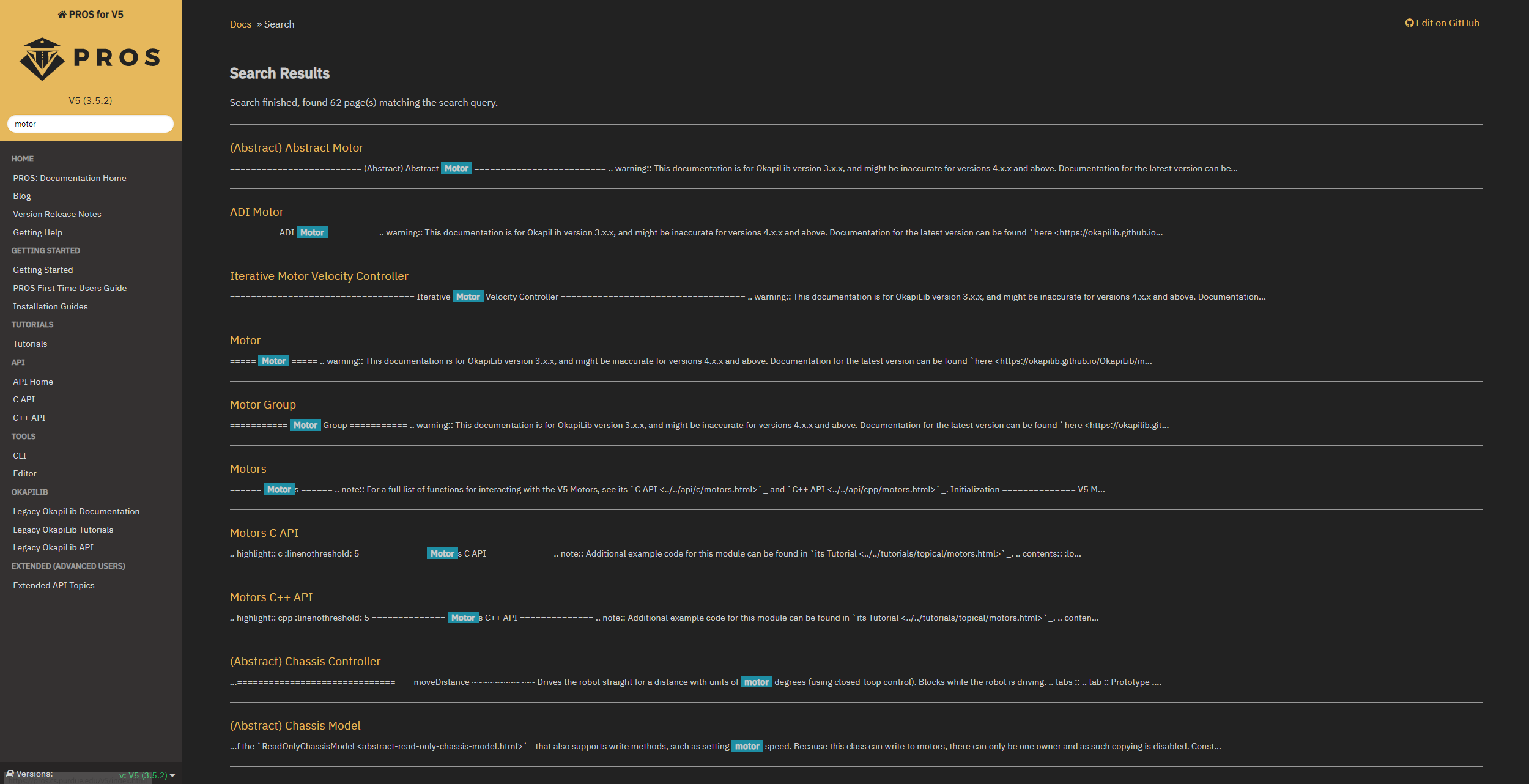
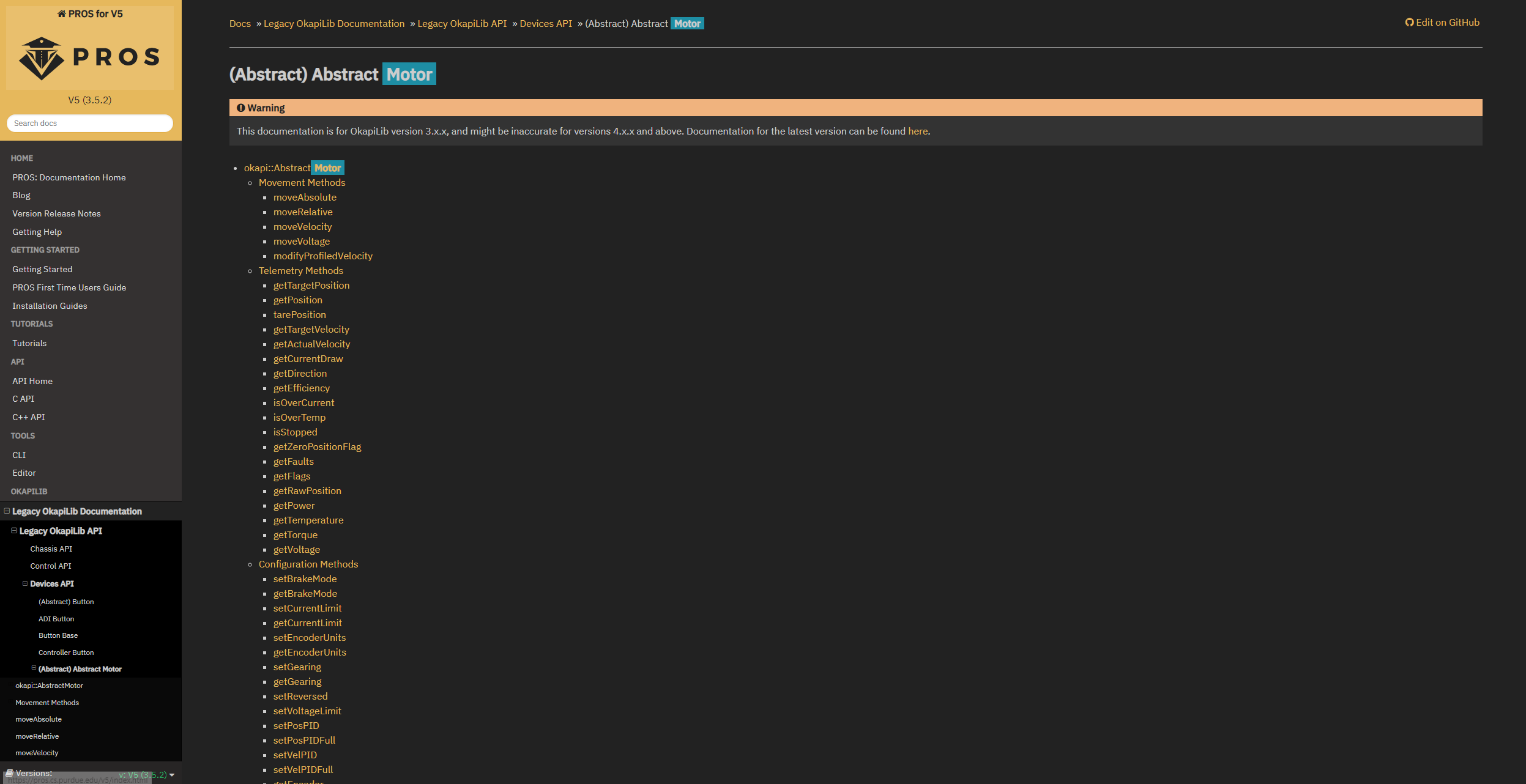
I feel like most people will not understand this structure nor devote the time to understand it unless they have the motivation to do so.
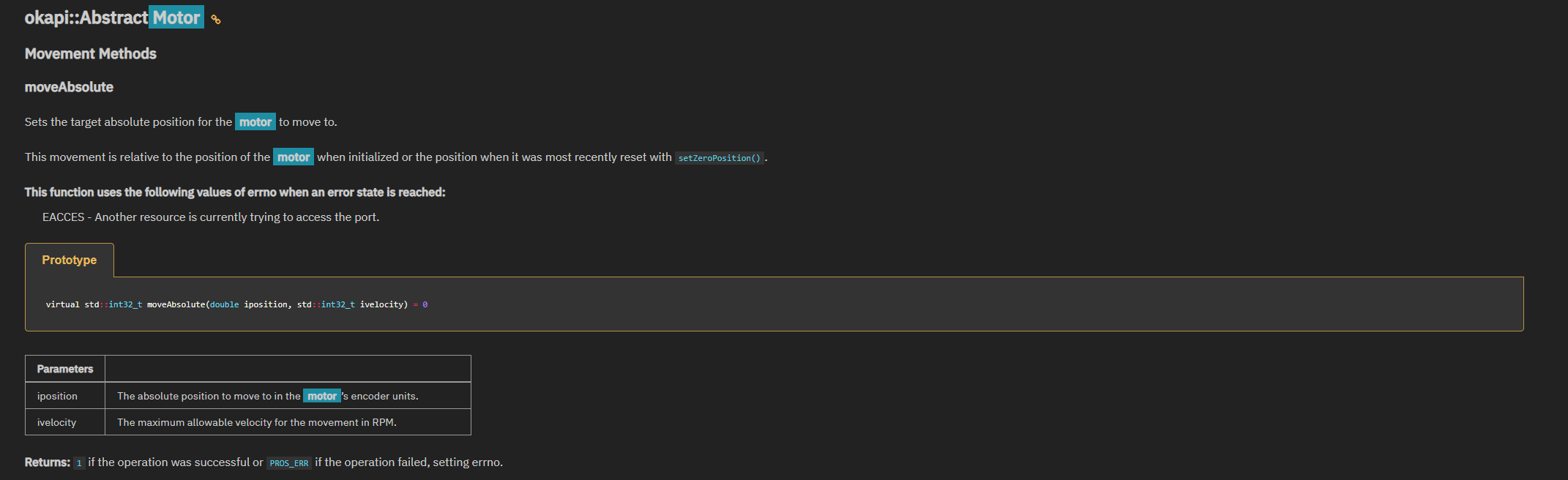
From a newcomer’s perspective, this is incredible confusing. I feel like if PROS want to make itself presentable to newcomers, they should show the function without the std:: nonsense to make it easier for newcomers to properly understand and write the function, or possibly include a side-by-side comparison of the prototype and function? I feel like how it is now, it is far more difficult to understand than Python’s API and almost any community-made API written in Python on Github. In a day of age where coding is simpler for the majority of the population, I do not feel like the presented information matches the status quo of how things are going in society when coding.
Most of the stuff I need should be presented directly in front of me, with no unnecessary fluff. Then the more advanced code should be categorized as such. Look at Google’s settings. Most of the stuff you need is there, but if not then you click “Advanced” tab at the bottom.
The objective of VEXCode V5 is to teach you what everything means, then when you transition to VEXCode Pro V5 you would no longer need a crutch of extreme “push-to-your-face” information.
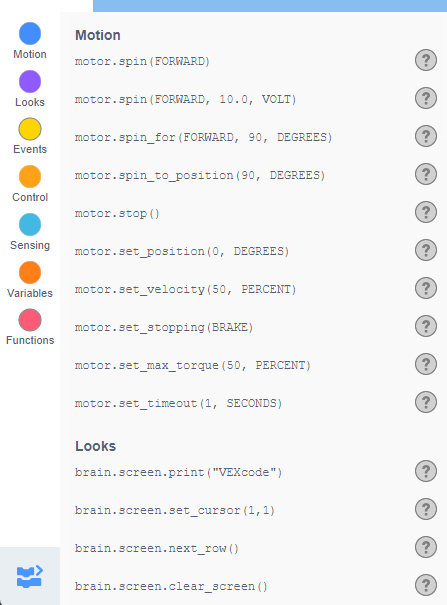
I would like to provide how to access documentation for VEXCode functions. I want to see the functions of the motor. Looking at it I see… No motor functions?
A newcomer would likely figure out that it adds functions based upon sensor setup. Adding a motor to the sensor setup, looking at the area again…
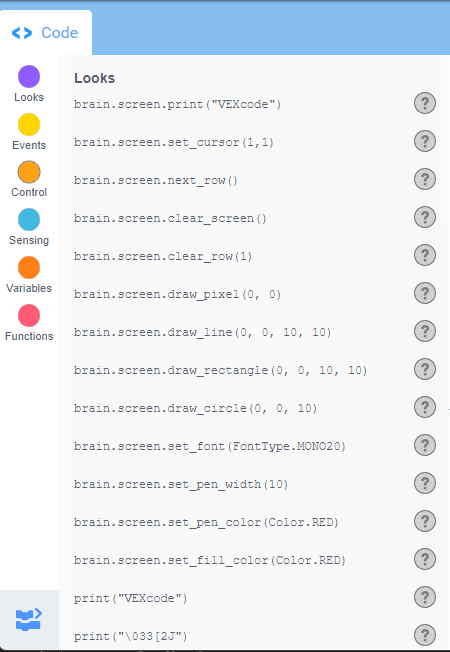
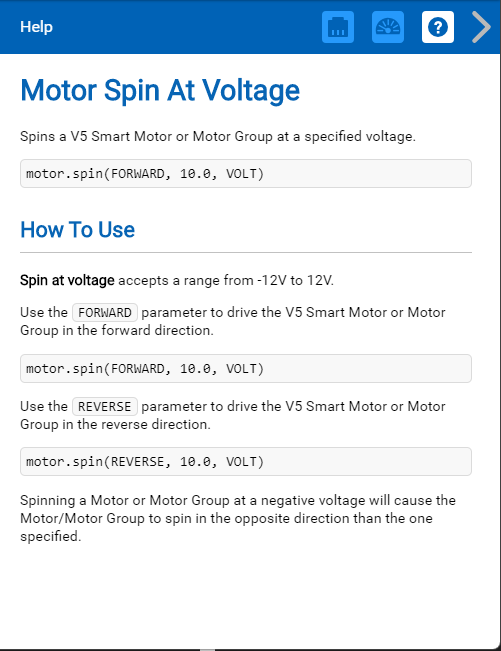
You can see there is all the functions 95% of most individuals in VEX need, categorized neatly. But what does each function mean or how would a newcomer use it? They would simply click the “?” next to motor.spin for voltage and a “Help” section pops up on the righthand side.
As you can see, it is straight to the point with VEX’s Embeded API. And it’s directly in the software.
Now, it is about as easy in VEXCode pro…
When coding, you can view the functions of the motor as such:
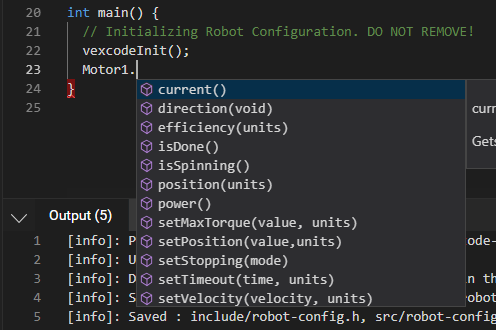
I want to learn about current, so let’s press “Enter.”
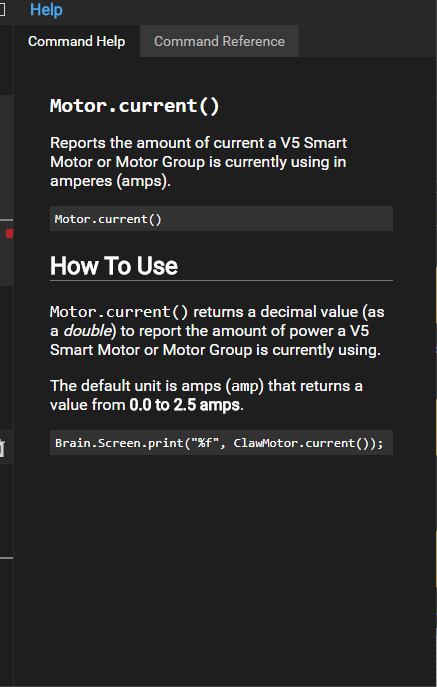
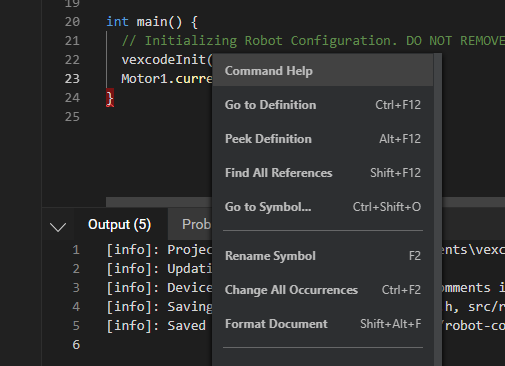
Then, a newcomer would right click the function in the code and I click “Command Help”
It then asks me which type:
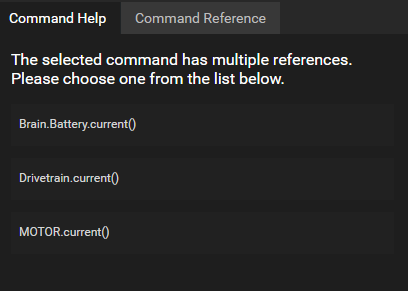
They would want to see what MOTOR.current() does, so they click that.
Straight to the point, in a manner that I feel like 95% of individuals in VEX should understand.
From what I can see, I feel like it is not correct to assume that PROS is just as easy as VEXcode. I feel like VEXcode offers an easier way of making information understandable and presentable in a manner that is clean and straight-to-the-point without fluff.