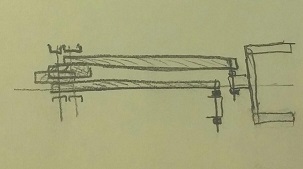
@Anomalocaris, that is a good observation about the top gear being offset forward - there are multiple reasons for that.
As @AperatureLabs correctly pointed out, the main reason for the offset gear was to move top bars forward such that their top/forward joints could be fully in front of the tower.

Also, splitting mid-section in two, allows precisely adjustment of distance between the gears (@Got_a_Screw_Loose got it right), improves its structural rigidness, and makes it easier to build entire DR4B in two separate pieces and then assemble them together.
The focus of the original DR4B post was to show how long screws in the joints could improve stability and precision of the DR4B lift. I wasn’t going to talk about the other features of that prototype until it could be tested with the real game objects…
Other goals were to see if you can build a stable tall DR4B with minimum number of custom cut parts and easy assembly. I am curious to see if such lift could be stable with just one side and that calls for all joints to be as close to the centerline as possible: