It is a well known “secret” among the veteran VRC teams that it is best to use single bearing screw joints when building 4B, 6B or DR4B/6B lifts.

With them you can achieve minimum slop, which translates into more stable lift that could go higher with more precision and less wobble.


When assembled correctly nylock nut is tightened almost all the way, but not fully such that you could still rotate the white spacer with your fingers.
To reduce slop and increase precision further you can use longer (2") screws. Below is a picture of the 2" screw tower connection for DR4B:
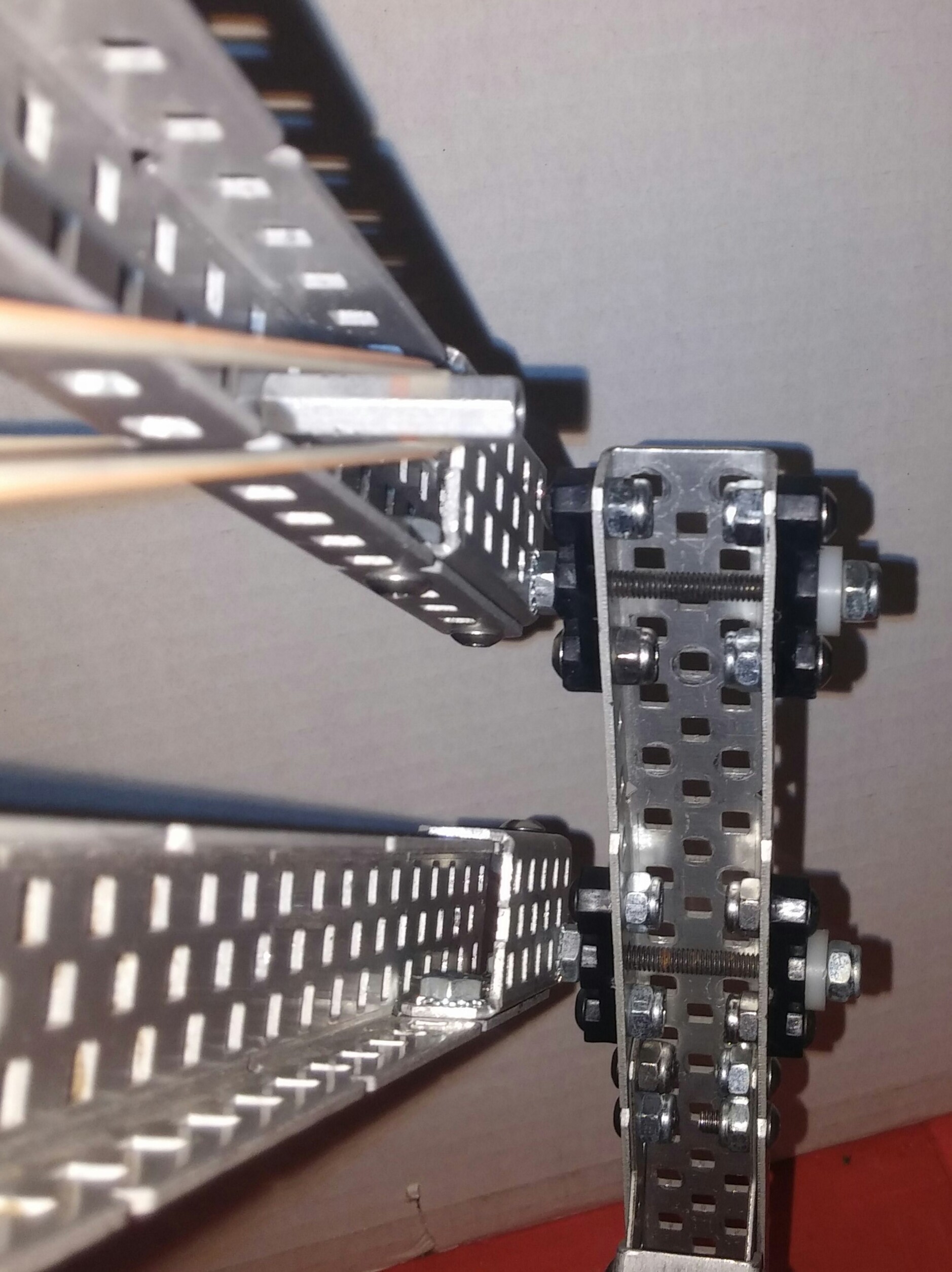
However, you have to be careful and need to regularly check those screws, because if they get bent you will end up with more friction losses than benefits.
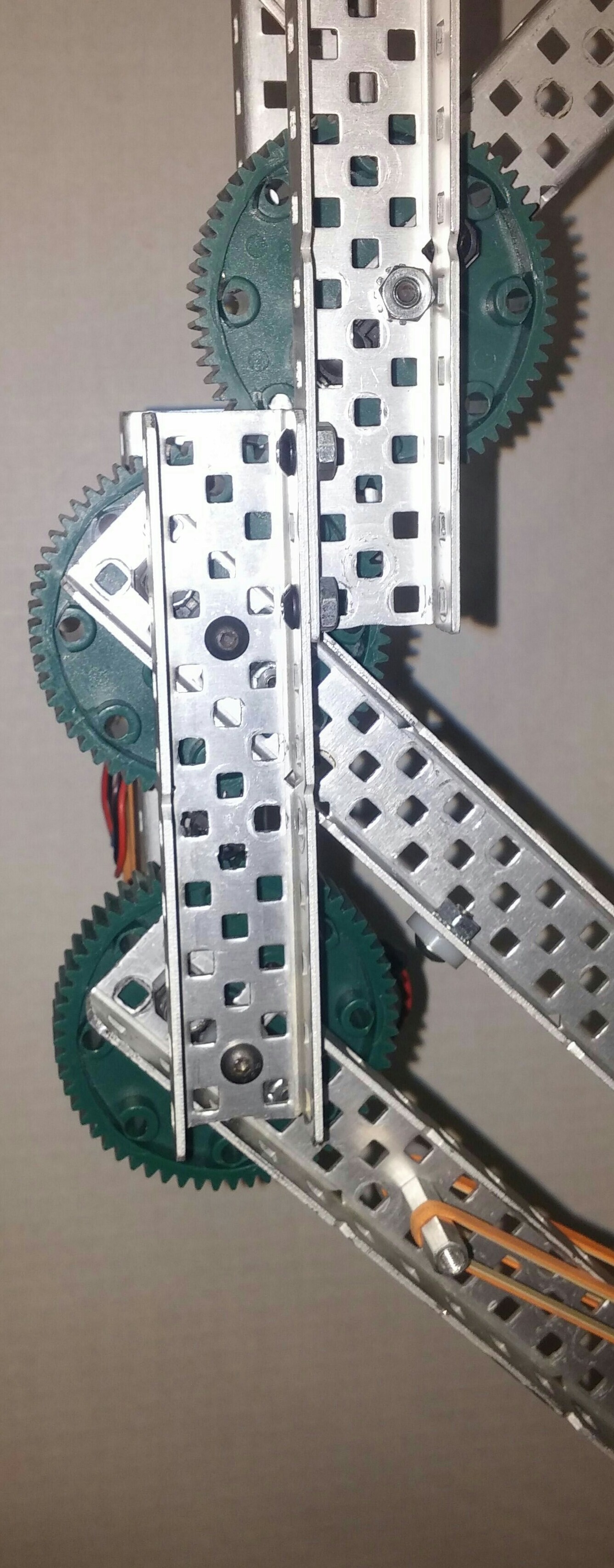
Similarly, to reduce wobble you could increase the width of the arm/gear assembly in the mid-section. Here,1.5" screws hold an extra bearing on 3/8" nylon spacers (note that spacers are slightly rounded with a grinder wheel to fit the shape of the newer 60T gears):

On the other side of the gear keps nuts are used for better overall stability:
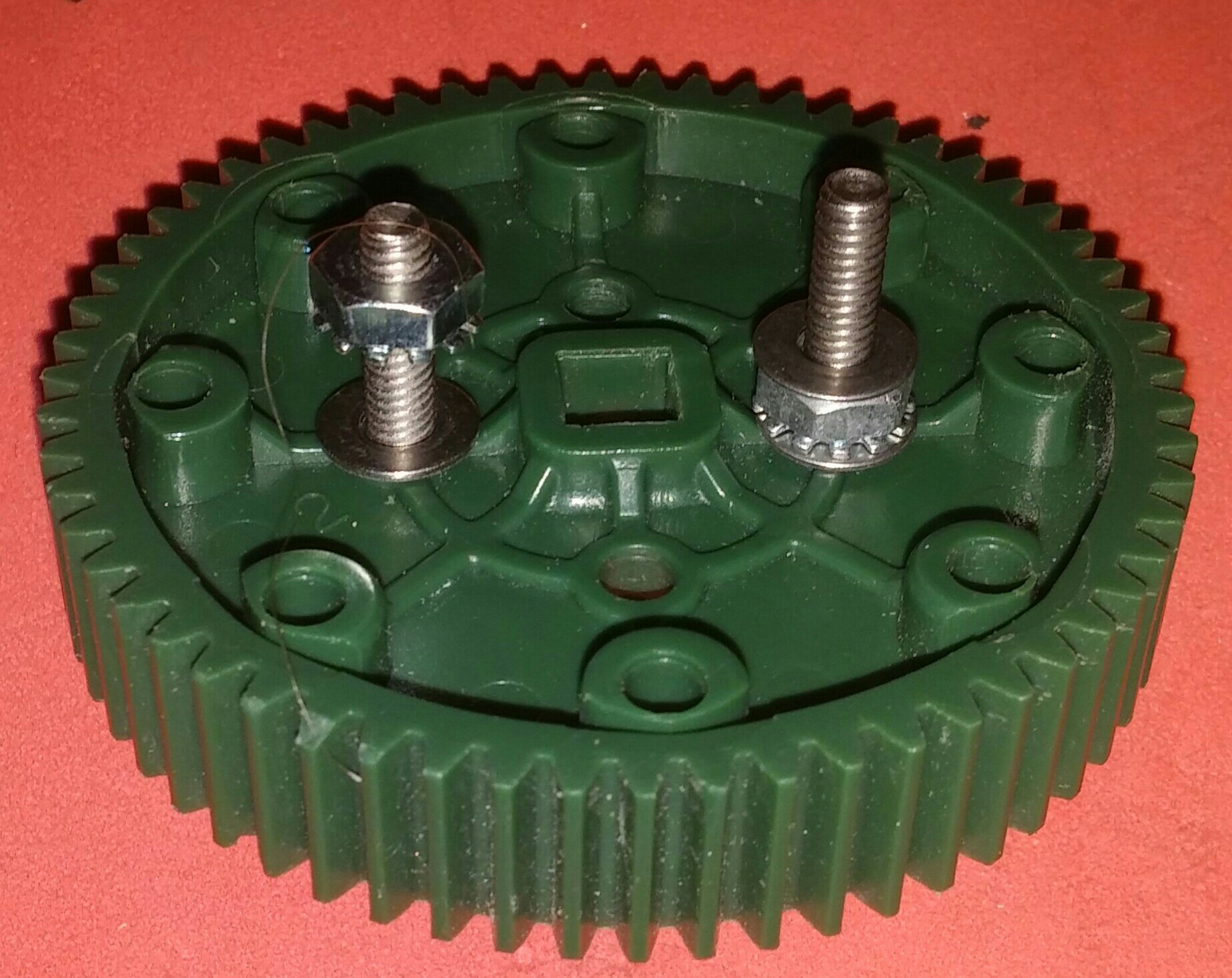
Washers are added under and over the keps nuts to get the perfect distance where c-channel is almost touching the gear.
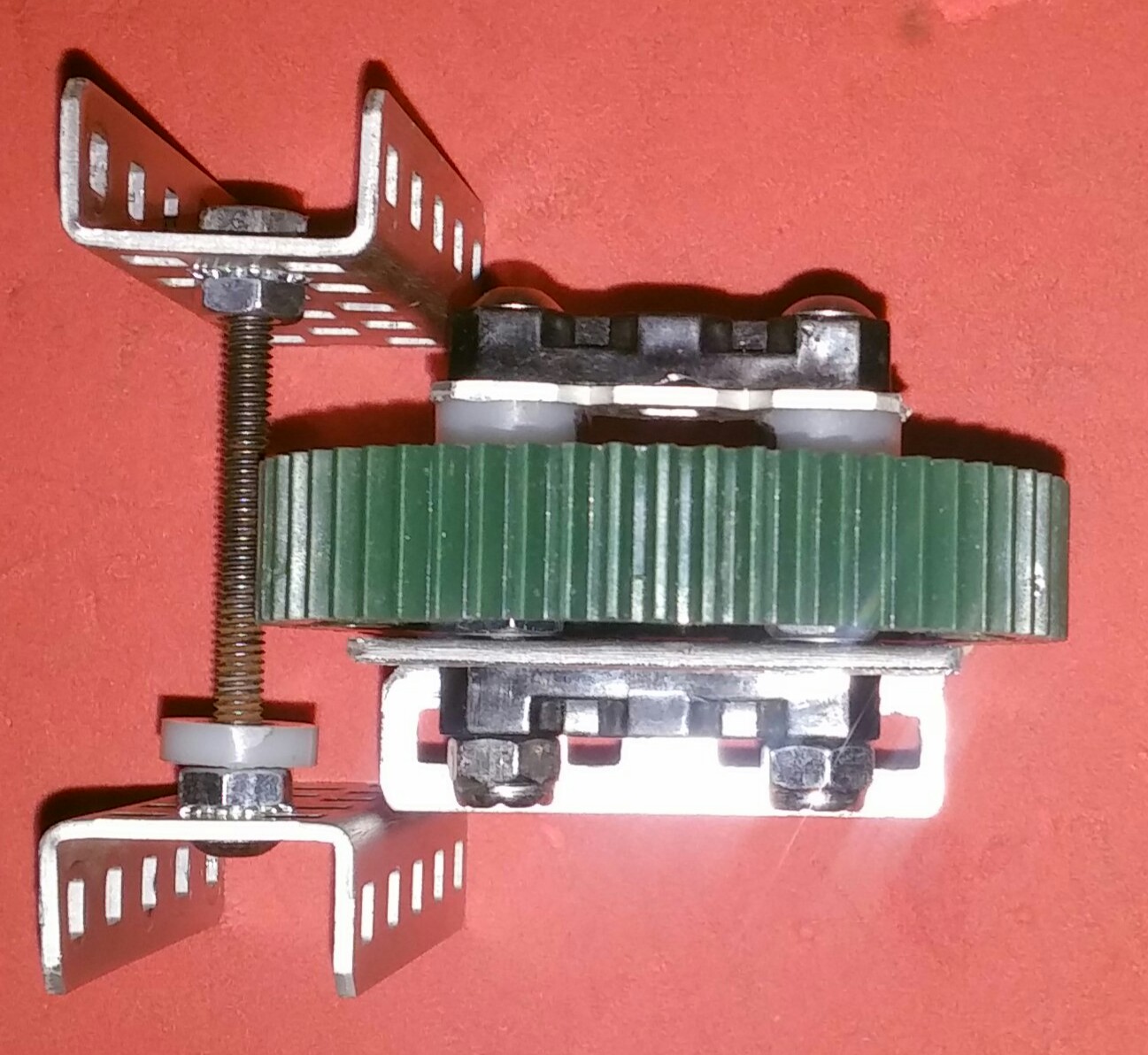
This fits perfectly with 2" screw that acts both as a gear axle and rigidly connects both sides of the DR4B mid-section. Same as with the tower connection you need to tighten the nuts such that there is no visible slop, but not too tight, to avoid any unnecessary friction. After the final assembly you can use a small ziptie to add some white lithium grease lubricant under the bearings and onto the gears.
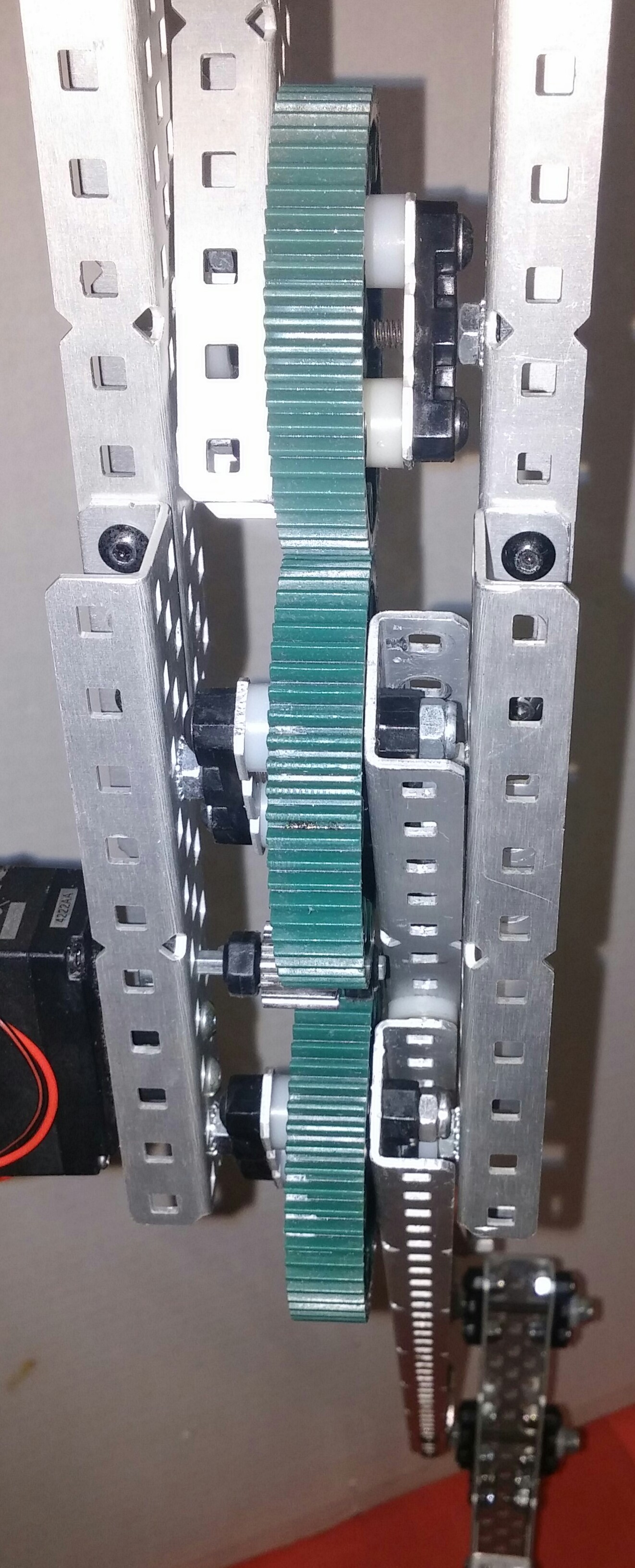
As you can see on the side view there is no need for any additional connecting hardware. Four 2" screws used as axles also connect the sides of the mid-section.
You can assemble top and bottom parts of the DR4B separately and then connect them at mid-section to get the optimal alignment between the gears.