To update everyone here, Nationals were held last week. We went undefeated through our qualifications, seeding 1st by 1 sp above 2900A, who we later Allianced and winning nationals with.
Most of our matches from Nationals have been posted, we were unable to get any from day 2 as the stream got copyright Struck. It will soon be back up and the rest of the matches including finals will be uploaded on our channel.
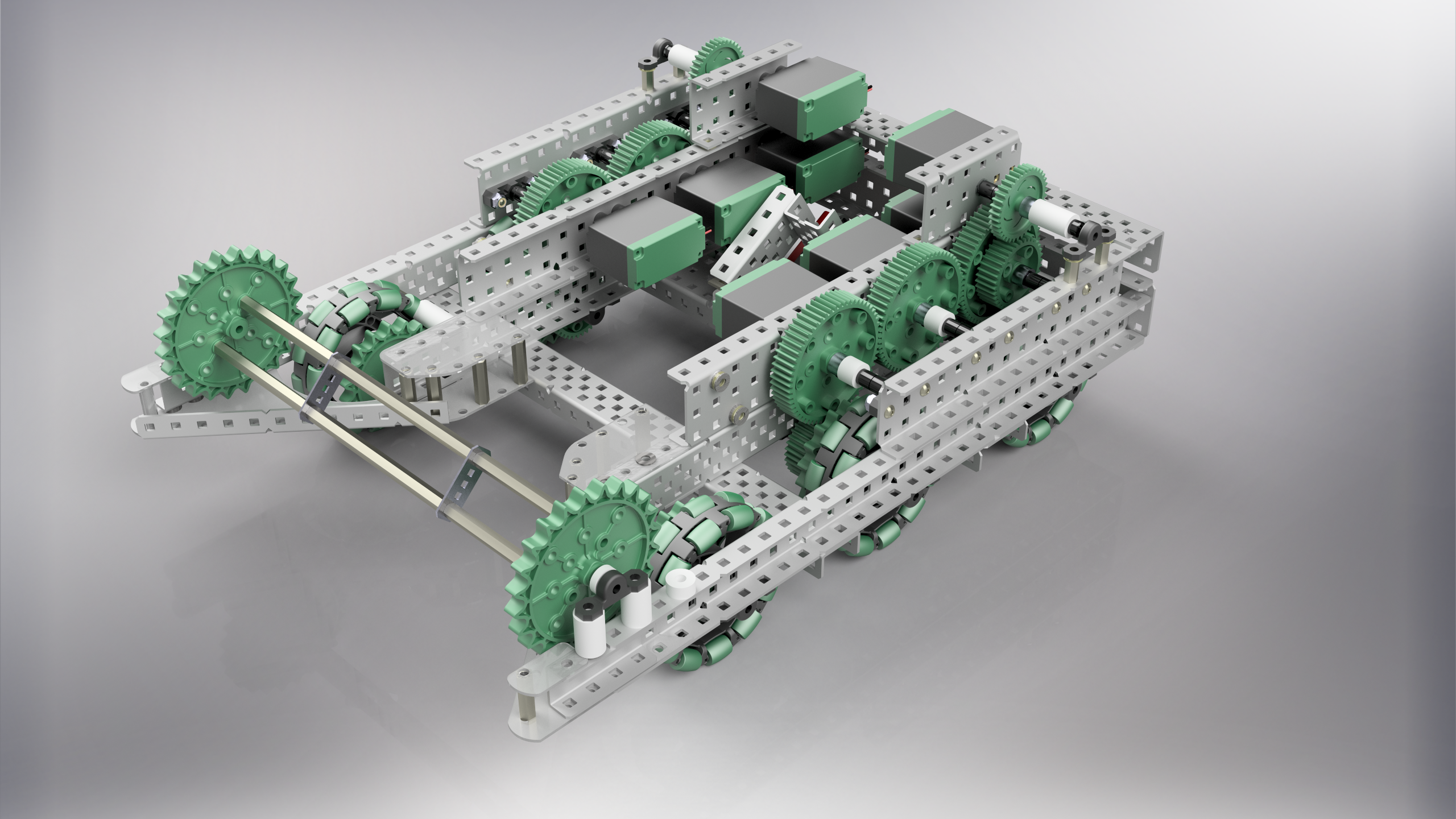
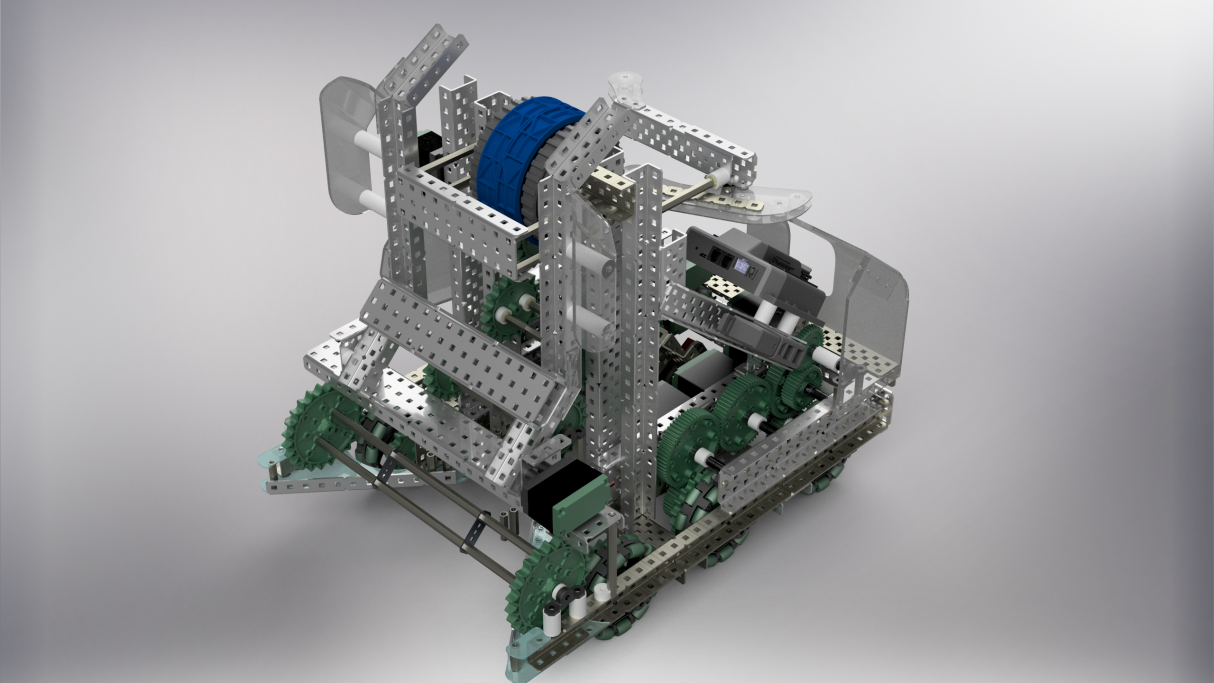
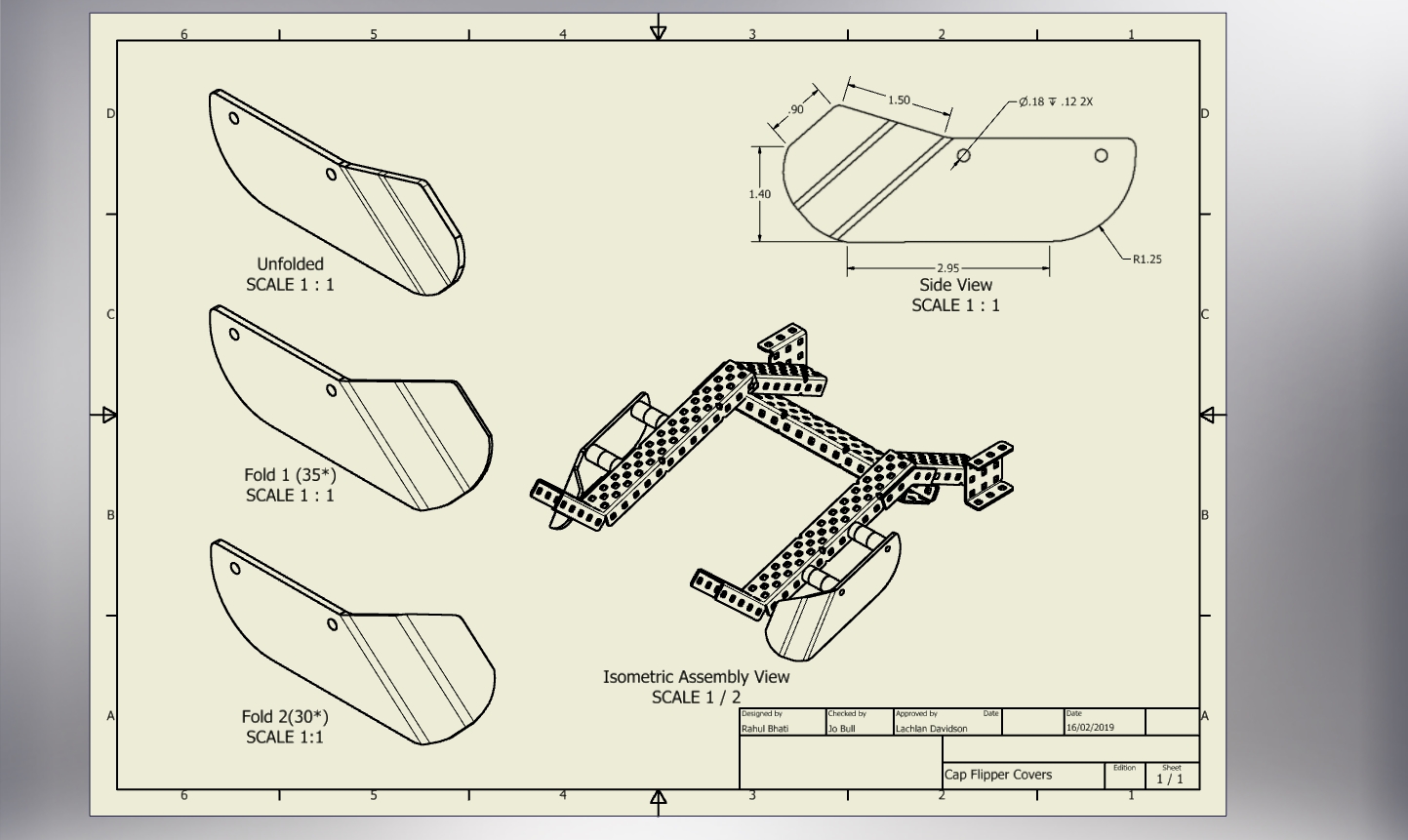
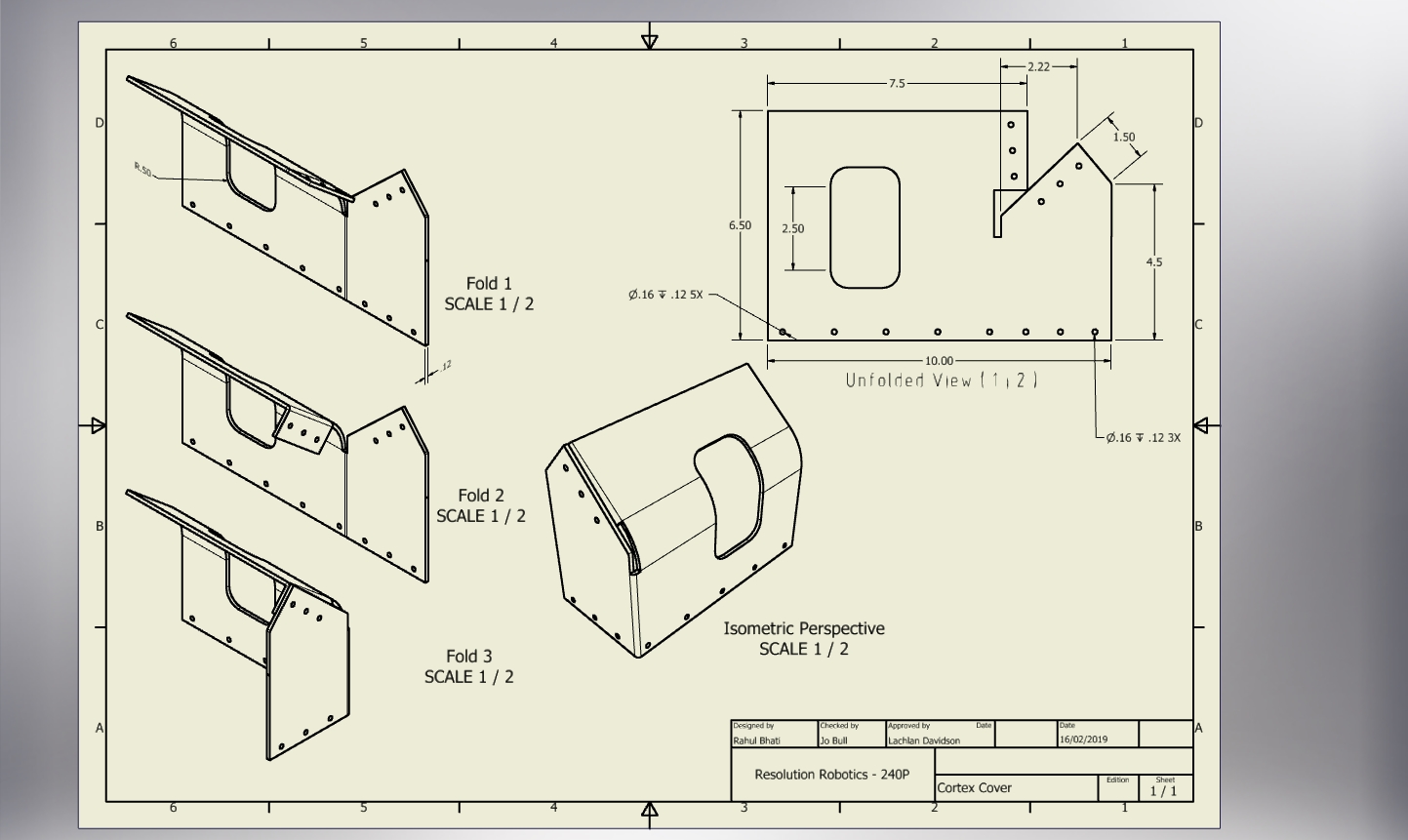
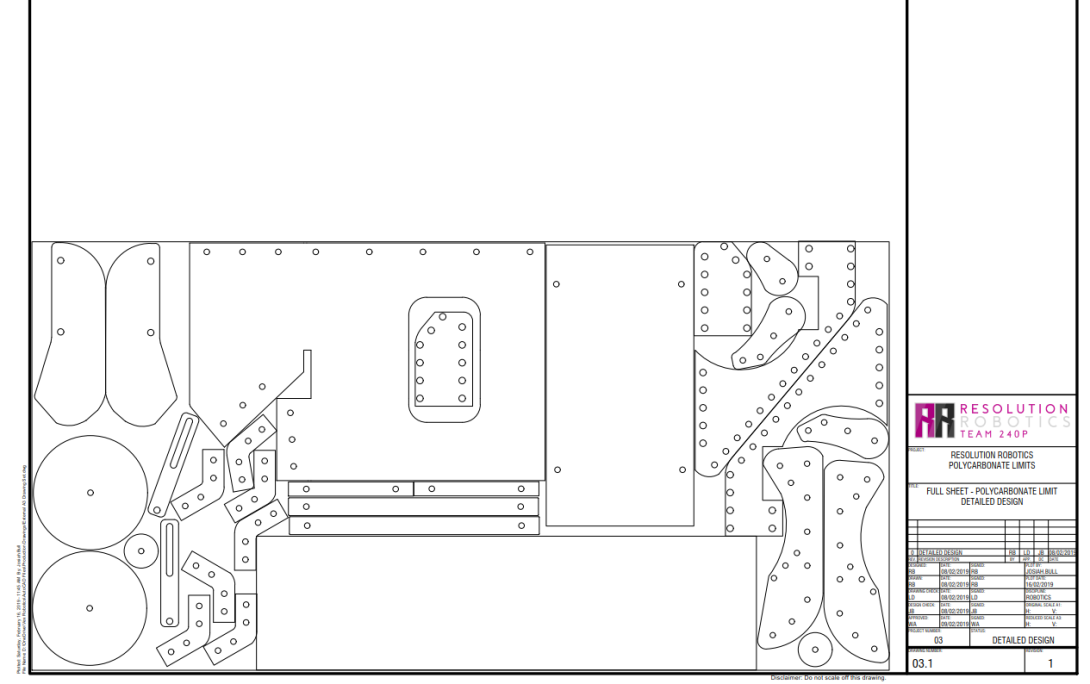
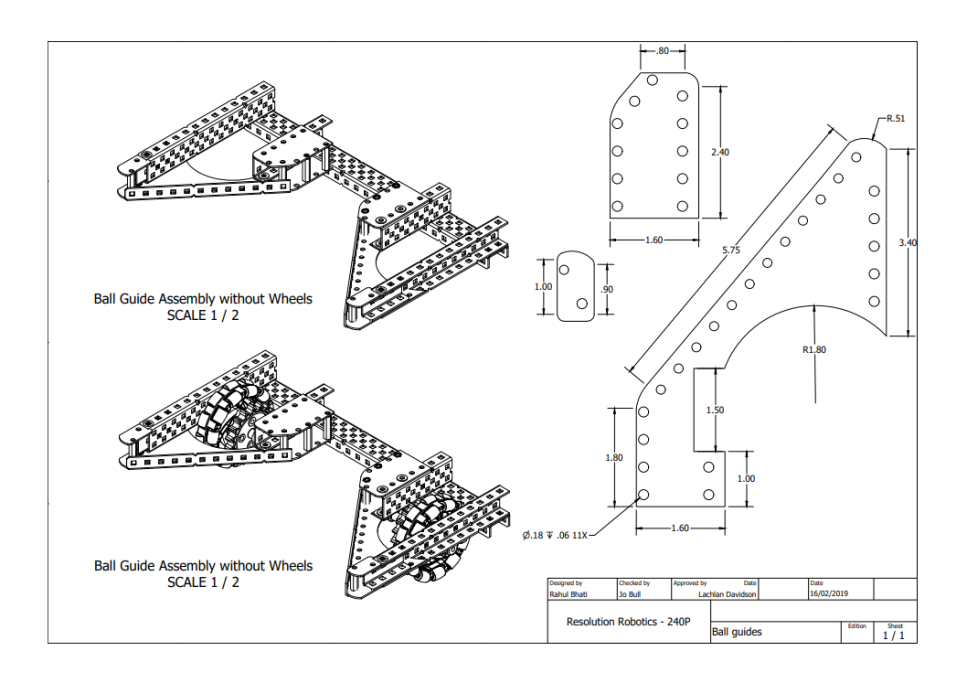
I briefly want to talk about Our design process for High quality. It was Caded over a course of a few months. 240P is located in different parts of the city and only meet up once per week. Due to this it made sense for us to cad the robot during the week and build during the weekend. The use of cad allowed use to test multiple designs and use our precious time during the build sessions to build. With cad we were also able to make custom polycarbonate pieces for the robot, this I am very passionate about. With this, we created many renders of the robot and technical drawings of the polycarbonate pieces that I would like to share.
Excellent job! I am amazed how well you guys perform, especially considering your meeting situation. Extremely impressive! I’d love to know what program you use, looks like inventor to me maybe?
[+1 respect]
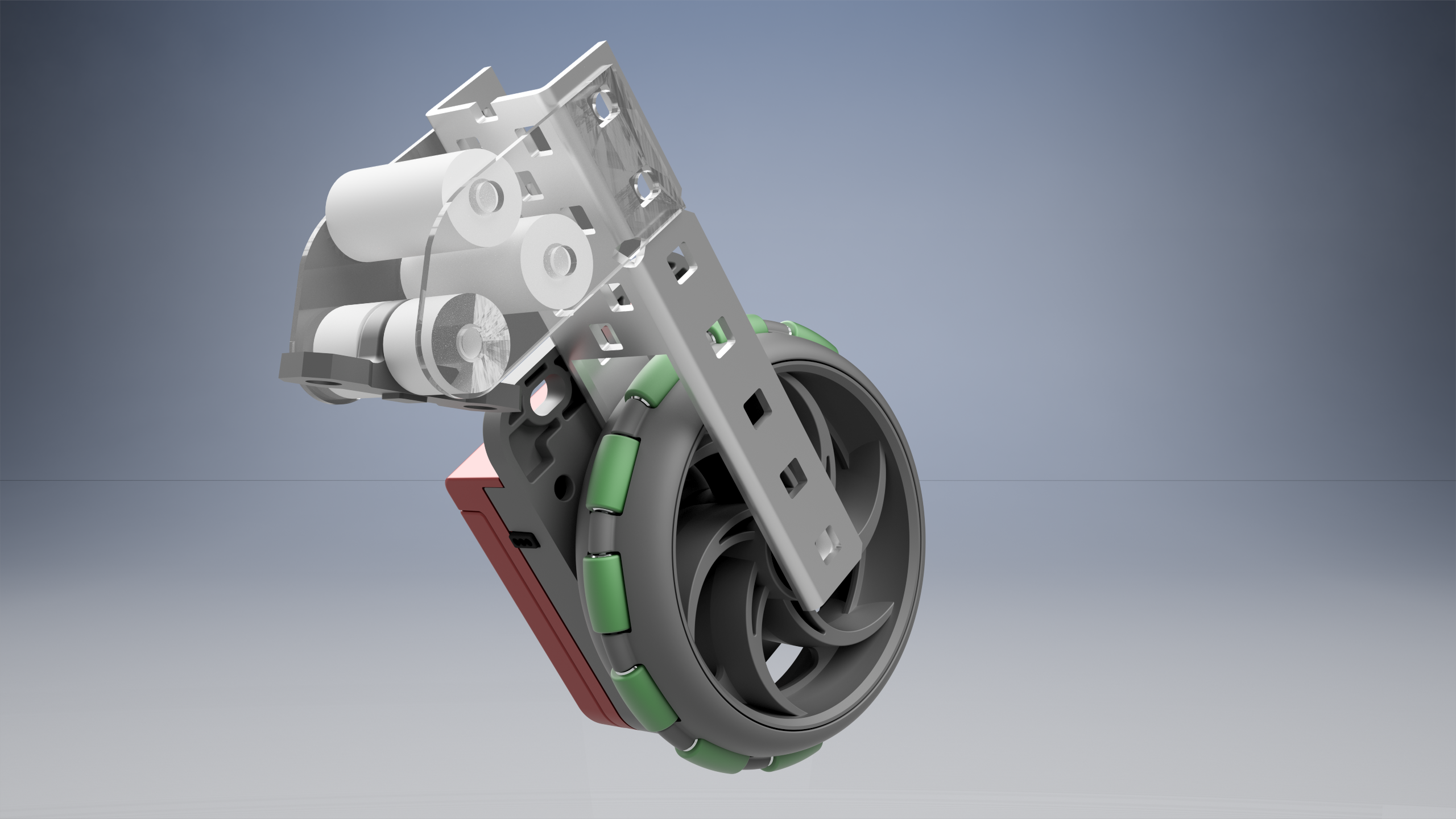
That tracking wheel looks fantastic. However, I have to ask how the axel was supported on the side closest to the camera. I don’t see a bearing flat, nor anywhere to put shaft collars but on the outside. I’m designing my own tracking wheel right now, and I haven’t quite been able to get it this thin yet. (I totally forgot that type of omni-wheel existed. I’ve been sawing mine in half. :P) I might have to try playing around with something similar. :)
Wait… Cortex OP!!! jk, we legit made it to state using only cortex and did a two day rebuild a week before our last comp and made state w/ it. and then got screwed over w/ match schedule… but thats how it be
i had a question about your tracking wheel mechanism, so the way you did it where do the rubber bands go (if there are any) and also isnt there supposed to be a bearing on the side closest to the camera for support? @proto