This is a newer version of the 9 day showcase, here you can post what you and your team have been working on so far in the season
I have been trying to work on cadding and I have over 600 lines of code. This gives a little more detail on the code. Custom auton template
This gives a little more detail of what I have actually done Other robot details
Looks pretty good, I’d recommend funnels for the intake and more than 4 wheels, but that drivetrain will do just fine.
I agree. Perhaps 8 wheels, 4 traction, and 4 Omni will be good for you. I participated in a scrimmage recently and found that not all Omni wheels are a good idea. Just something to chew on.
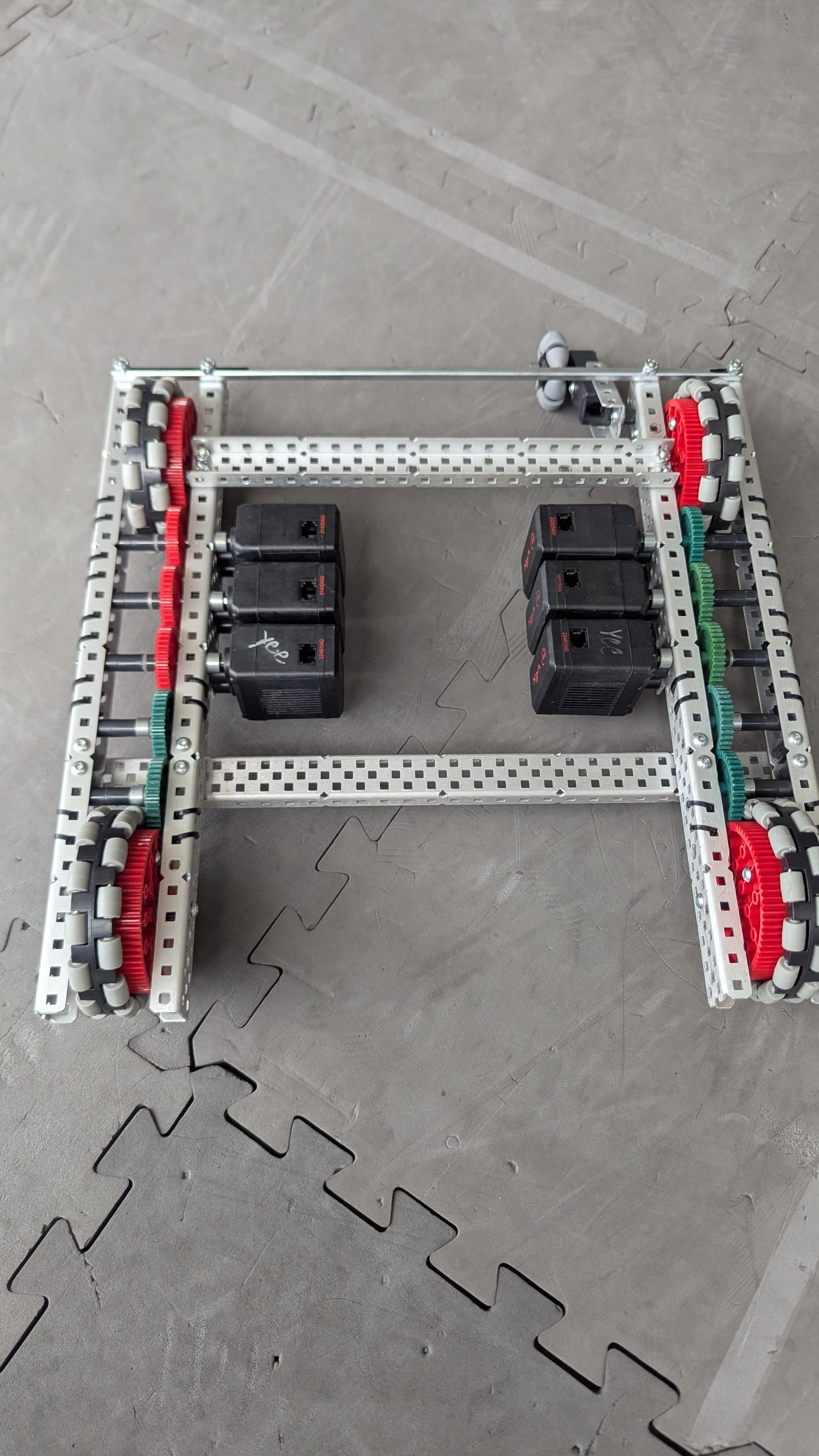
Um, first off why is there a random Odom wheel at the back? Secondly, that drivetrain is under braced and that shaft on the back seems like it isn’t doing much (I could be wrong).
The standard for bracing is 2 full c-channels and 1 half c-channel, as people usually use high strength shafts as additional bracing. Also I agree with more wheels neededn, while it isn’t needed it’s good to increase traction, ect. To me it looks like those shaft collars are rubbing? I could be wrong tho.
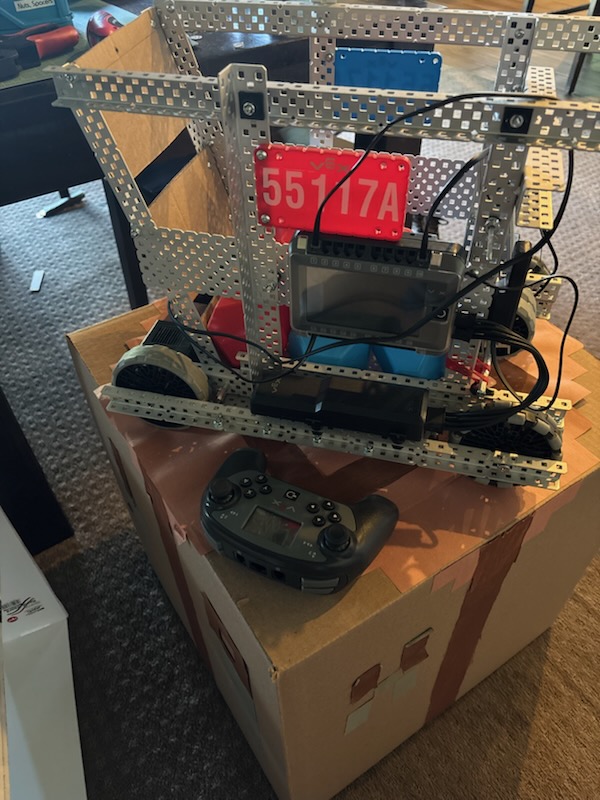
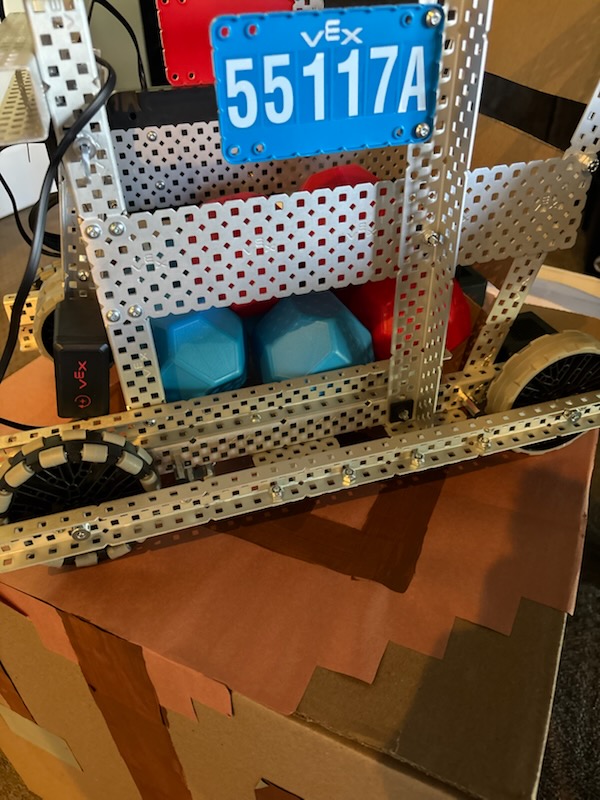
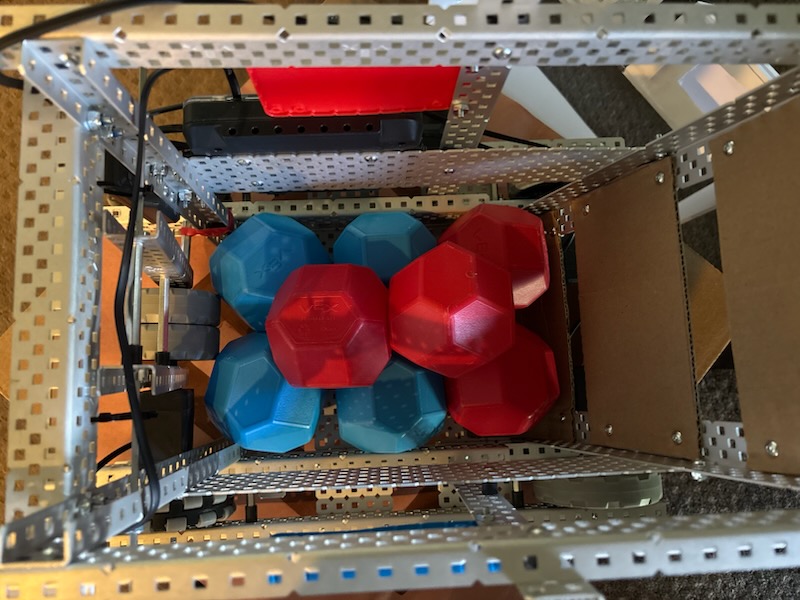
So far I’ve got a drive base and an intake. I’m about to build a belt to bring blocks up to a goal.


I keep moving the brain around as I build though, I’ll hopefully have a permanent spot for it soon!
I’ve also built my own goal out of foam board so I can practice at home before the school year starts.

I have to say the DIY field is impressive have you managed to reinforce the structure of goals?
We were just getting started. I have since changed the mounting
It is the strongest material VEX offers, so I say it makes a great brace.
I have 2 full length and a partial cross brace.
I prefer a smooth barrier cross. We considered a 6 wheel config.
They are perfectly placed with a washer in between to reduce friction.
Pfft, nah. It’s a super weak structure made of foam board. It works well enough and I just need to not ram into it too hard. But it’s better than having no goal over the summer!
Its a strong material, however it actually doesn’t make your robot any stronger. Having a brace in the back as one of your main is not a good idea as the drivetrain is still flexible compared to a brace in the middle. I would recommend a 3 wide to cut the weight in half while providing a similar security.
i’m not gonna lie that drivebase looks kinda slow… if ur going for like a 284 rpm when ur gearing 36 to 76 i would suggest increasing the rpm and decreasing the wheel size. this will just help in general with like acceleration and such. but i do like ur vertical motors. very nice.
Actually, are you using screw joints? If so, could you show a close up of one for a wheel?
This is my 2nd year of V5 so I’ve been trying to learn more about building techniques.
Thanks.
I would like to see your basis for this claim.
Yeah it is a bit slower than other teams run, but our driver struggled to run full speed with 450 2.75, so I decided not to push the speed any faster.


I mean it’s pretty obvious, imagine having a single brace on your bot, keeping it at the end will not help with the stability of the drivetrain as compared to a brace in the center, the purpose of keeping a brace in the back is either to prevent objects from going into the robot (a thin high strength axle will not do that) or to keep the two sides of the drivetrain together. Since you are using a high strength axle, it’s simply just more weight than using a 3 wide. They both would offer the same purpose (actually I think a 3-wide would be better due to the fact you can fully box the channel to the drivetrain). A 3-wide will provide better support for the back of your drivetrain. Also, if the high strength axle were to bend from repeated hitting, it would actually bend your robot, where a 3-wide would not create an impact as strong as a high strength
I appreciate the clarity, but that is not the case here. Imagine two drivetrains with me. One with two cross braces about 3 inches apart in the middle, and another robot, with cross braces on the very front and very back of the robot.
Which will have better resistance to bending?
I would say it is obviously the one with a brace at front and back. Now of course it is impractical to have a brace at the very front, so my solution is the next best thing.
I (someone who does robotics instead of a sport) can bend, twist, and break a 3 wide with my hands. High strength axles are magnitudes stronger.
I appreciate the dialogue, as these are non-absolute topics, with lots of room for learning and improvement
I’d be worried about the HS axles breaking where the screws are mounted (especially if you get hit from the back), since the metal there is probably quite thin. honestly, you could probably even remove it entirely and be fine, you already have 2 other braces. the other thing I would recommend is adding a center traction wheel. I don’t think it would be too difficult with your gearing (move the powered gears around, maybe stack one of them and replace the extra unpowered gears with a larger one for the wheel), and it’ll be very helpful for this year due to how defense is likely to be played.
Anyone else working on some exciting new stuff ![]()