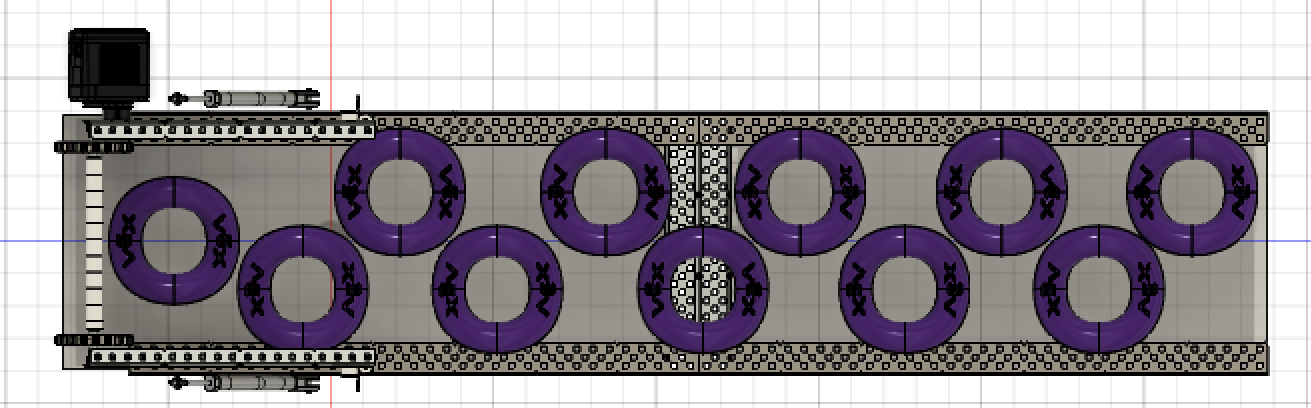
You could probably widen the tray to allow the rings to somewhat stagger and have guide rails. Like this (guide rails not included in the pic):
yes, but that’s kind of the point. you want the tray to be long so that you gain a lot of height by moving rings to the top.
also you could probably come up with some kind of basket or something at the end of the tray that can hold a few extra rings, just to increase possession.
I know that this is a little late, but I’d like to address some things about this design. This was actually the first design style I thought of, but I eventually moved away from it for a few reasons.
So one of the problems is intaking them as you mentioned. You could do a standard top down roller intake, but that is going to have trouble spitting them out the front, as they may not go directly out the front. They may also not go out perfectly straight out the back, making scoring hard. If all you have is a top down roller at the front, then the only way to push them out the back is if you intake more, pushing the others out. You could do a standoff roller on tread, but then you have to deal with somehow unfolding that and still with getting it past the wide roller, assuming you do something similar to what I posted early season:
The second is the biggest problem with this design, I think.
It has to do with the placement of the mobile goal lifts. Basically, the front one would be completely blocking the intake. You could make it so that the intake goes underneath the front lift, but then you would have to move the mobile goal lift forwards and backwards somehow every time you wanted to raise and lower the lift.
These are just my thoughts, I’m sure this design could be competitive if you got it to work.
I have actually found what I think to be a very good method of bringing rings up an angled conveyor in such a way that allows fast and consistent rings depositing from both the back and the front, and allows for fielding.
It’s still a half-baked prototype as of now, and while it has potential, it could still be a bust. So I don’t want to give too much away until I have a fully functional robot using it, but that should be sometime soon. Lets just say I think it has the potential to be vastly superior to plunger intakes.
One problem it still has is that it does block a goal lift on the front side of the robot, but I don’t think it’s necessary to have a base mounted goal lift on both the front and back ends of a bot. My plan for multiple goal possession is to be able to grab and lift a goal with the front of my ring lift. This will mostly be used to place goals on the side of the platforms without climbing, but will still be useful for goal possession if needed.
I also have some ideas involving pneumatically powered hooks on the sides of the robot that can clamp to goals if I want to employ a goal-centric strategy.
The main design principle of my robot is to be able to competently do every reasonable strategy, that way I can adapt to any situation. And I want to be able to manipulate rings at a much greater pace than a plunger intake can provide.
What do you suppose will be the best way to get rings onto mogos?
I think a chain-bar lift and a dr4b combo is a good idea…
my team is building a passive scoring bucket onto a dr4b, but currently looking at making it motorized. the passive works great though
i can only pick up one ring at a time but I’m using a clothespin kinda reverse claw, basically 2 c channel on gears, with antislip mat, get the 2 c channel inside the ring, open it up, and lift it up
the meta doesnt exist yet lmao
the unspoken meta I guess…
that’s what like everyone is doing
I would argue that a plunger intake is more common at this moment. But there are so few robots revealed yet that it’s too early to say that everyone is doing something.
The annoying thing is that my team has outvoted me on trying to score on the tall goal…
yep, seems everyone is hiding their designs so far lol
I think it’s mostly that only a few people actually have anything tangible to share at this point. Previously teams still had some school left when the game was unveiled which allowed school-only teams to make early season robots, which wasn’t possible this year.
Also it’s just a really hard game compared to change up. When change up was revealed, many people instantly were able to come up with what was essentially the meta for the entire season. This year it’s very different, there’s going to be a lot more designing and thinking that most people have to do before they can come up with anything to share.
The thing about plunger is that its a lot harder to stab a ring than it is to drive up to one
Would a plunger claw be better for repeatedly poking the same spot in the case of the preloads? I’d assume that you have to let go of the rings on the tiles before the robot can even touch it. If it were that case, it would make introducing preloads much faster and possibly good for skills or even autonomous.
I am using the intake in the jersey devils reveal but I am putting a twist to it by trying to add a ratchet mobile goal lift in the front as well as in the back.
If you use this GIVE CREDIT
Ey mate, you cant ask people to give you credit for a concept.
I invented the concept of scoring points, if you use it be sure to GIVE CREDIT.
If I had to guess I’d probably say that a roller and plunger intake would be roughly the same for match loads. The big difference between roller and plunger with the rings already on the field is the amount of precision required, which doesn’t really play as big of a factor when you’re creating the pick up location.