I think there might be some similar mechanisms to the IQ ringmaster game for picking up pringles. Might have to be tuned a bit for belt intakes to work with weirdly shaped objects.
This can likely be solved with some sort of PID algorithm with a gyroscope where you tell your partner to park near your side and your robot will push the opposing robot up. If it the ramp is tipping towards the other side your robot will automatically adjust by driving outwards slightly.
gyroscope seems actually really useful for automating parking. Still might be difficult though, since the tilting motion of the platform will cause robots to accelerate in unusual ways.
I know this is kind of late but I think the meta for most competitions is gonna be dr4b with a mobile goal lift on the back(kinda like most itz bots) I would love to here some people ideas on how to get more then one mobile goal on there robot.
I have a question that I couldn’t really find an answer to but, would one of the diagrams in the game manual, they demonstrated that the goals don’t have to be touching the platform to be considered “elevated”. So if you bring your robot while carrying a goal with you onto the platform, would that count as 30 points for the robot as well as 40 points for the goal?
yes, as long as both the robot and the goal meet the definition of elevated, so they both give points.
Oh wow that’s pretty cool. Would multiple goals on the platform each count for the bonus? (Let’s say you had each robot with two goals, would that be 230 + 440 points?)
Some images made using @Joey_24K’s Onshape Cad - for y’all’s consideration. Each of these answers a question I have had.
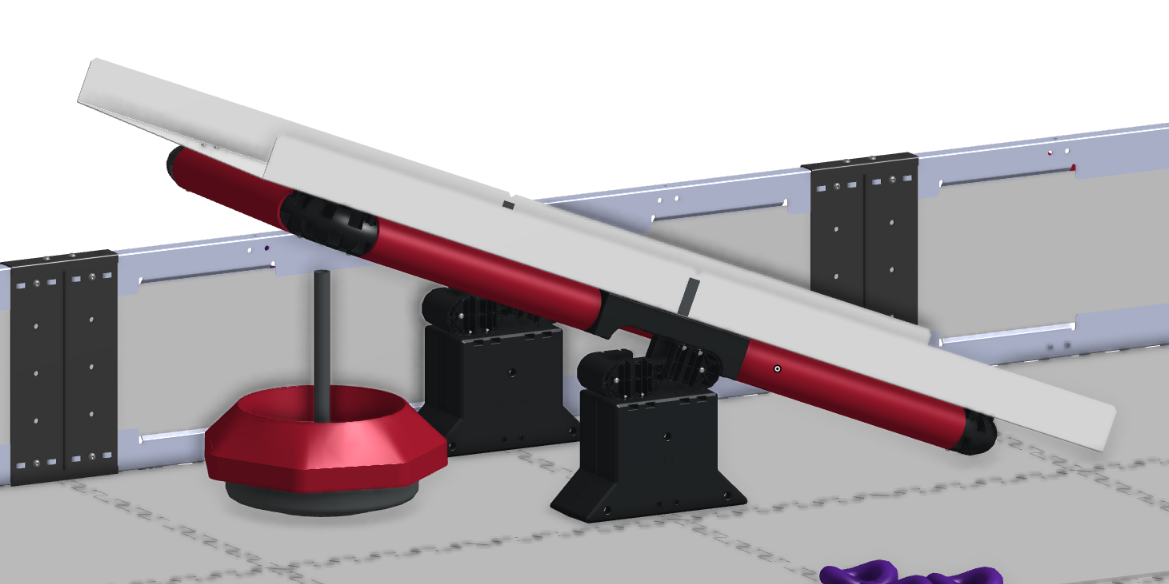
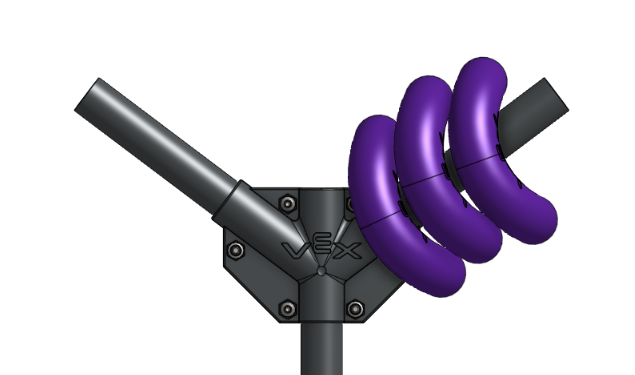
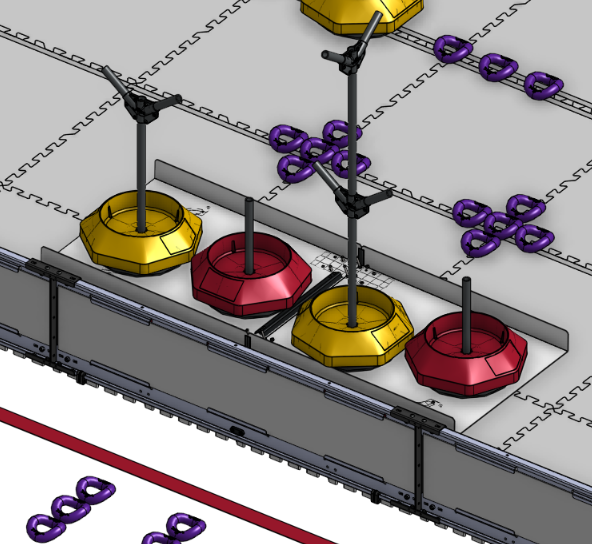
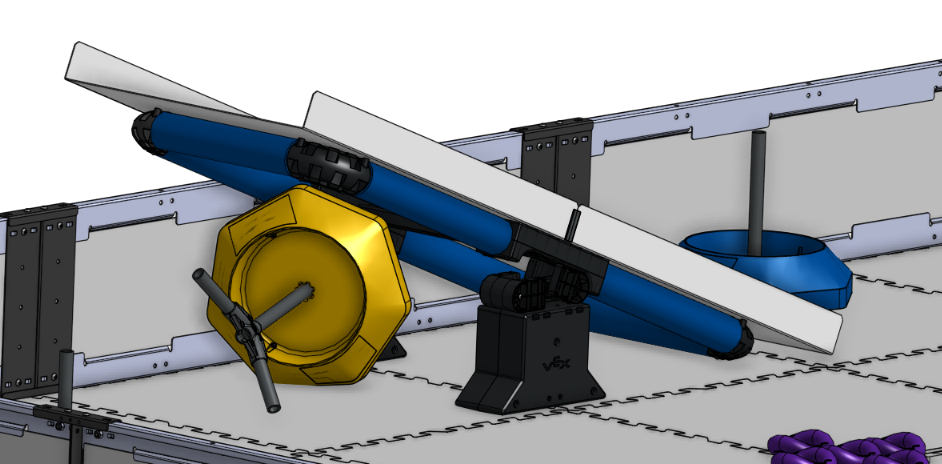
Link to the cad on the Resource Share Thread
yep, no limit to the number of goals that can be elevated, so each one that meets the definition will give points. The exception being that alliance goals only give points when they meet the definition elevated and are on the proper color platform.
What about something like 185A in Starstruck with a big hopper and an arm? You could probably fit 4 mobile goals in the hopper and hold the last one in the arm and then balance on the bridge solo. Do you think something like this could work?

I do see a lot of potential problems, challenges, and issues with this design. It was just an idea I had, and I was wondering what other people thought about it and if it could actually maybe work?
Mobile goals are heavy. Don’t tip over.
The mobile goals weigh about twice as much as a cube, so I could see some potential problems lifting them. However, I think that something like that would probably be powered with pneumatics. You could probably also power it with the new stronger motors that we have now that weren’t available back in SS though, but I’d probably go with pneumatics.
You also wouldn’t have half of your hopper filled by scissor lift, so you could have a smaller hopper lower to the ground, meaning a lower CG. I doesn’t matter if the mobile goals tip over in the hopper, and if they are close to the ground, it should make your robot pretty hard to tip over.
Think about it like the multipliers in TT. You can descore from neutral ones, just not from alliance ones.
Because of SG7, you can only hoard 1 mobile goal at a time
Well, you can only ‘hoard’ one at a time. Hoarding, as defined in the game manual, means putting them in the corners of the field where they’re hard to get to. There’s no rule saying you can’t possess more than one.
Bot concept: Spiderman
Hook a ring during auton and get the WP, then go around wrapping rope on all the goals then pull them to your side.
Please for the love of everything good, nobody build that.
There is now a 36 inch horizontal expansion limit.
horizontal expansion limit exists this year. no wallbots, that’d break the capture the flag element of the game too much.
Excuse me while I go cry in the shower.
I was thinking the same thing! I think that dragging could be a really good strat.