Hello all,
Just as a heads up for those reading, my post doesn’t have to do with a robot I’m constructing for a VEX competition. It’s instead a question I have regarding a VEX component.
I am pursuing a science fair project for high school, which involves a VEX 393 motor. I have a question regarding whether or not I will be able to use it for my experiment.
Just for context, here’s the rough outline of my experiment:
Question: How Does Load Resistance Impact the Power Output of a DC Motor?
Independent Variable: The load resistance of the circuit.
Dependent Variable: The time it will take for a winch to lift a weighted string over a certain distance.
Procedure:
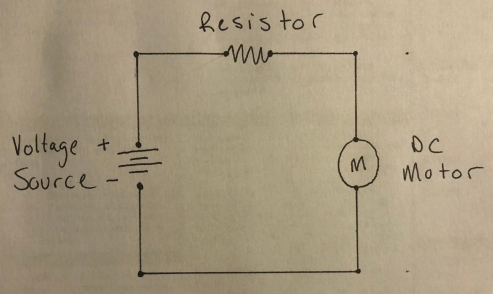
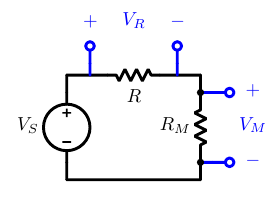
1. In my experiment, I will have a fixed resistor of a certain resistance in series with the winch system that is powered by a single DC motor. This winch system is connected to a weight of a specific mass by a string.
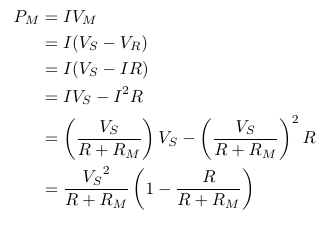
2. Using Ohm’s Law as well as the resistance value of the resistor I am using, I will be able to calculate the theoretical value of power that the motor will exert.
3. I will turn on the circuit and measure with a stopwatch how long it will take the winch to lift the weighted mass. Using the equation W=Fd, I will calculate the Work that was performed by the winch. Then, using the equation P=W/t, I will calculate the experimental value of power that the motor had exerted.
4. I will perform step 3 (or more) times to reduce error.
5. Then, I will replace the resistor I used with one of greater resistance, and repeat steps 2-4.
(I also attached a PDF of my proposal in case you’d like to read that):
James Lee - Science Fair 2020_2021 - Initial Project Idea.pdf (184.3 KB)
All components will be placed in series with a voltage source that emits a constant voltage, regardless of the load resistance.
The problem I have is from my engineering teacher. To quote him:
“The motors are variable speed, but I’m not sure if they’re varied based on current. If so, the project will work great. If they’re variable based on voltage, it might either A) have enough power to lift it and perform the same function every time or B) not have enough power to lift it.”
So, my question is, does anybody know if VEX 393 motors are varied based on current? I figured this would be the best possible place to figure something like this out.
Due to COVID, I don’t have access to the robotics lab, and I can’t figure this out on my own. I will have to borrow parts from my school and do the project from my house. So, if I find out that my motor won’t work after I had already brought it home, I will be out of luck.

{kind=link}