For the VEX IQ Smart Motors is it possible to disable the Internal PID or tune the internal PID to optimize for a fly wheel?
There is an old thread with @jpearman on this topic :https://www.vexforum.com/t/robotc-has-pid-to-control-your-flywheel/31108/11
which explains a bit about the PIDs and how they can be tuned in RobotC, but can this be done with VEX IQ Smart motors and in Vex Code?
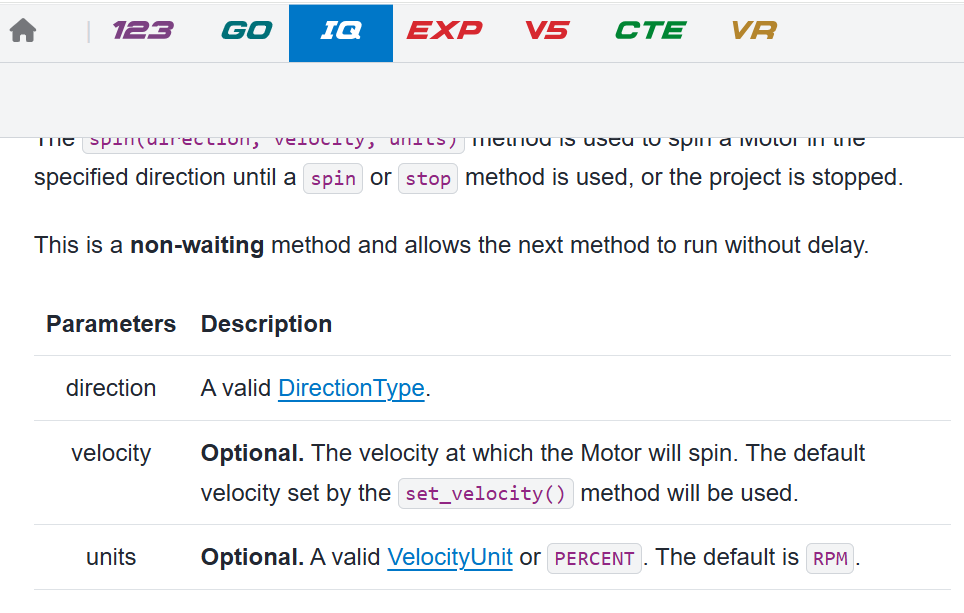
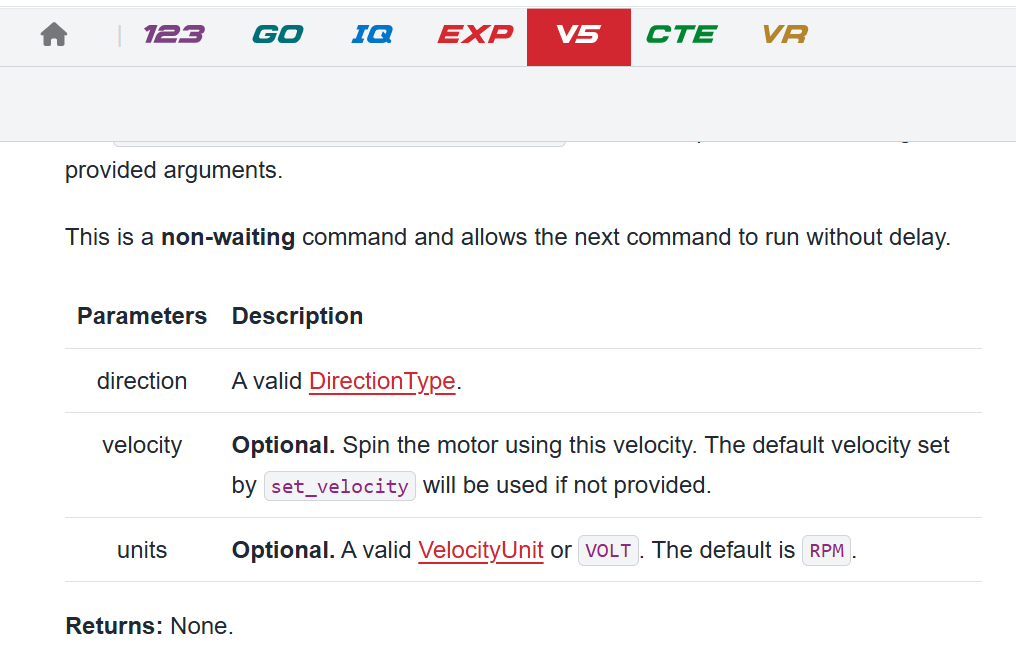
It appears that voltage control is supported with IQ and in VexCode
/**
* @brief Turns on the motor and spins it in a specified direction and a specified voltage.
* @param dir The direction to spin the motor.
* @param voltage Sets the amount of volts.
* @param units The measurement unit for the voltage value.
*/
void spin( directionType dir, double voltage, voltageUnits units );
However, for a IQ gen1 brain it doesn’t seem to compile and with a gen2 brain it compiles, but the motor doesn’t respond.
Has anyone had any luck with voltage control or internal PID adjustments?