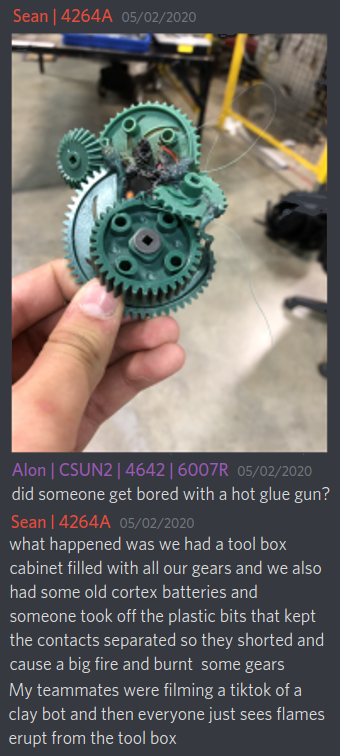
I agree that differentials could be very confusing - if I don’t think about them for a few months then, in my mind, they start to blend into a melted blob of gears. ![]()
Writing down equations for the forces (torques) acting on the gears is what helps me to detangle what’s going on. And while it is not obvious how motor outputs are connected from the image of @Kyle1’s design, this is my best guess:
After you go through all the math and gear sizes, the equivalent simplified force (torque) diagram will look something like this:
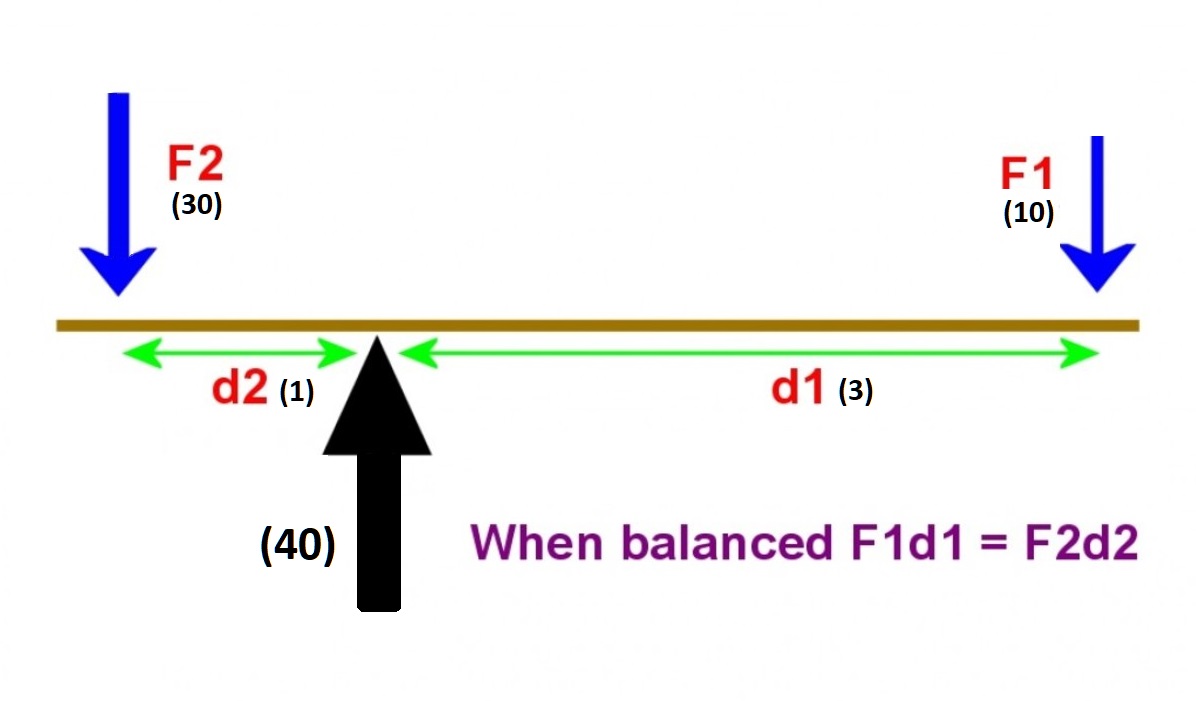
(It is not the actual gear ratio from @Kyle’s model - I choose 3:1 to make this example easier to read).
If the gear ratio between the motors is 3:1 then, for everything to be balanced, one motor needs to output (10) units of torque and another motor needs to output (30) units of torque. Together they could push the output that generates reactive torque of (40) units.
However, if the torques out of the motors are not balanced then, when reactive torque (of whatever is connected to the differential output) gets too large and stalls the output, the motor that is geared for more torque will backdrive the other motor that is geared for less (or everything will stall if the motor control system could detect backdriving or other overpower condition and shuts down the power).
According to my math a few posts above - motor torque at the carrier needs to be 8x the torque driving the input sun. Otherwise you are creating unbalanced torque situation and motors need to be shut down before one of them reaches 100% of max torque to prevent potential backdriving of the other (that is already at 100%). This prevents you from utilizing both motors at 100%.
In the high torque mode both motors push in the same direction, adding their forces.
Imagine you and your friend both standing on the ground lifting a heavy box together. You try to lift it up with the same speed and then your efforts (forces) add up.

In the high speed mode, one of the motors runs forward, another runs in the opposite direction, and through the clever gearing adds extra output speed by bouncing off the first motor.
Imagine that now you lift your friend and your friend lifts the box. The box velocity is now the sum of how fast your friend lifts the box and how fast you lift your friend, but if neither of you is strong enough to lift the heavy box - you can only lift the final load that is lighter than half of the max load in the first case (high torque mode).

{kind=link}
In actual designs (for example, this worm gear based differential) the max load in high speed mode is 1/3 of the max load in high torque mode. However, the velocity is 3x, so you end up with 100% motor utilization in both modes, minus the friction to run differential gear train.
If you know the current of V5 motor then you can estimate the torque it produces (minus the friction and electrical resistance losses, for which you could derive coefficients with experiments). Knowing torque out of both motors and differential gear ratios you could determine output torque and detect any potentially dangerous condition that would warrant power shutdown.
Yes, if you use stock motor cartridges and don’t do external gearing to get 8x input torque difference as described above, then you can end up backdriving one of the motors and don’t get any benefits of differential (i.e. extended torque and velocity ranges).
To summarize, two speed differentials only make sense when the game calls for two very distinctive operating modes, where one calls for something like 3x torque at 1/3 speed, and the other calls for 3x speed at 1/3 the torque. Then the benefits could justify increased complexity and friction losses in the longer drivetrain. Otherwise, it’s just an interesting concept without practical use.
On the other hand, if you want to use differential to share motors between two actions that don’t have to happen at the same time, like the driving and lifting heavy goals during ITZ season, then you could have more practical success, given that you are careful about the build quality and keep friction losses from exploding.