For those who are not jumping on the latest trend of the lightweight clawbots and are sticking with building heavy pushbots, especially 50 lbs and up, this reveal may come handy:

This is a fully automatic two-speed transmission that could operate in either high-speed or high-torque mode with 3x multiplier. For example, if you power it by three turbo motors it could deliver either turbo speed with the combined torque of 3 motors or torque equivalent to 9 turbo motors at 1/3 of the speed.
In this setup, two motors on the left provide 2T torque, while the steering motor on the right either adds 1T torque, if run forward, or adds 2x speed at the expense of 1T torque if it is run in the opposite direction.
It is built around a non-backdriveable differential where power could easily flow from the input shaft (on the right) to the output shaft (on the left), but the worm gear prevents large output resistance torque from backdriving the steering motor.
As opposed to the design described in the previous post, it is a compact version that has worm wheel and gear assembly riding inside the differential casing. Majority of the explanations from the above still apply, but the most important difference would be that forces which are transmitted by the worm gear are limited to 3T (vs 6T in prev example). Here is a more detailed picture:
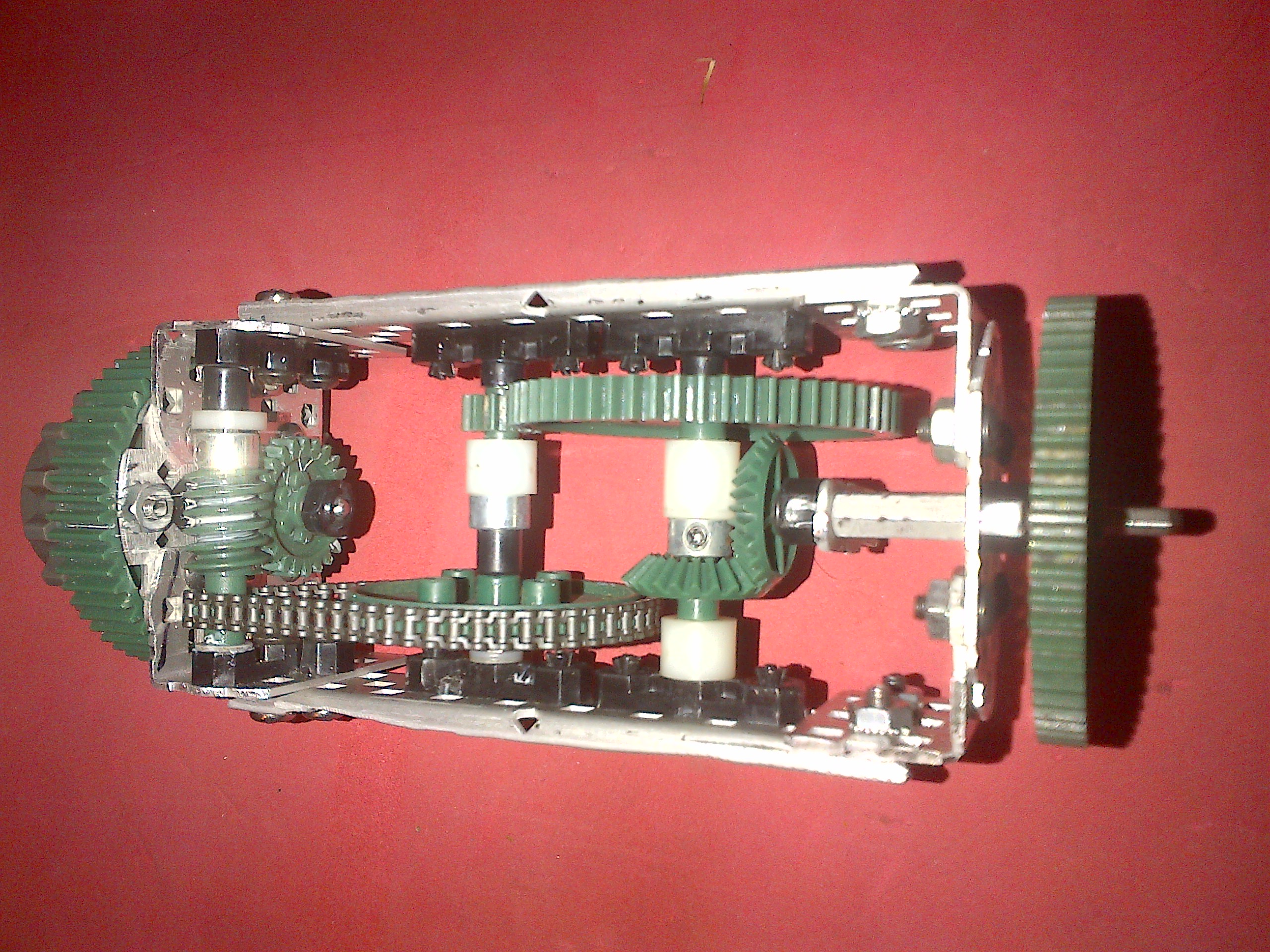
With the combination of 5:1 gears and 48:10 chain link prior to 1:24 worm gear it achieves a perfect 1:1 ratio. Similar to the challenges of the flywheels last year, increasing speed 24 times requires a lot of attention paid to the friction. It took quite a while to figure out right spacing and alignment to minimize it.
However, once alignment was done and all high speed parts lubricated - it runs very smoothly. In fact, at this point, there is an opposite problem - the friction between worm wheel and worm gear is so low that differential could fail to lock if steering motor runs forward faster than the pair of the power motors. Control algorithm needs to take this into account and match steering motor speed to achieve reliable locking.
Contrary to the common belief, the low-strength chain is not the weakest link in this implementation. If you manually increase output resistance and matching torque on the input side - worm gear would still be running smoothly, while the bevel gears were the first to skip. According to my estimates in the worst case scenario of three torque geared motors at the stalling, you could expect about 15 in-lbs of the load on the bevel gears and about 2.5 lbs of the linear force on the chain (well under its shock-load breaking point of about 5 lbs).
When dealing with any chain, to minimize impact of the the shock loads, you need to make sure it is neither loose nor have any extra tension - it should be relaxed, but with very little free play.
In the initial testing everything seems to work great, but I still have doubts if worm wheel and gear are strong enough to endure continuous drivetrain load. My main concern now is if it will hold well under shock loads and not twist out of the alignment after some rough play, like running robot into a wall at full speed several times.
The differential has an outer diameter of about 3.5", so you could conceivably drive the shaft of 4" wheels without any additional gearing, but I would hesitate to do that without proper casing that would protect it from the dust and foreign objects.