If you were reading this thread, you could come to conclusion that this transmission design sounds too good to be true:

Also, if worm based transmissions are really that good, how come they are not used that often? Actually, there are some solutions like Torsen differential that have special gears that look very similar to the worms:

However, those multi-start worms have much lower gear ratio than 24:1 worm drive used in VEX and are more like the helical gears.
In general, the problem with the worm drives, especially those with high gear ratios, is that they could be very inefficient. Here are the efficiency curves:
VEX worm gear is made of POM and looks like it has 10 deg lead angle with a friction coefficient (POM/POM) somewhere between 0.14 to 0.20. I wouldn’t be surprised that, if not lubricated, VEX worm drive could waste up to 50% of the energy to friction.
Even if you could lubricate it down to 0.07 and cut the losses, then still, why would you want to have something with 25% efficiency loss? That would be insane if somebody pitched this design for the commuter car.
However, in case of VRC, the optimization criteria is slightly different. It is very important what happens during the 2 min of the game, and it is not as important how much charge is left in the battery when the game ends. If something could give you competitive advantage at the expense of 25% efficiency loss it might still be worth it.
Now, lets take a look at the expected performance of the shifting and non-shifting transmissions as a function of the output load. Assume that we have three motors that could run at the nominal speed (1x) and generate torque up to (1T) each. Note that as the load on the motors increases, the output velocity decreases. Also, we are assuming that you do not push motors into the ranges where they will stall or overheat.
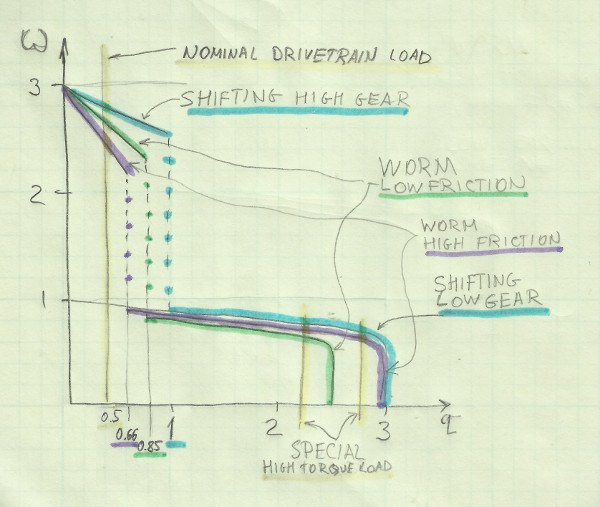
Blue lines correspond to the shifting transmission. In the high gear (top blue line) you are expected to get high speed around 3x and usable torque up to 1T. After transmission shifts, you would be getting 1x speed at 3T torque (blue line on the bottom). Shifting transmissions have virtually no overhead vs direct drive in either high or low gear modes.
In case of the worm-based transmission, there are additional friction losses in high speed mode (when worm drive runs), which is represented by the green and violet lines going down at the steeper slopes. You could still get high velocity, but the maximum torque available at the high speed will be reduced, because portion of the motor power needs to go toward the friction losses in the worm drive. The less friction losses there are - the higher output torque you could get.
When you switch into the low gear (high-torque) mode the effect of the worm gear friction is the opposite. If you have too little friction in the worm drive, then combination of the load resistance from the output shaft and the torque coming from the steering motor could break the static friction lock and let the output shaft slide below 1x output velocity. According to my calculations if you have friction coefficient as low as 0.05 you will be limited to 2T torque coming from the power motors and couldn’t get additional 1T from the steering motor.
Depending on the amount of the friction in the worm drive you could have less than ideal torque performance in either high speed or high torque mode.
So what are the possible advantages of the worm-based transmission?
First of all, there is no externally actuated mechanical shifting or locking so you are not risking breaking or jamming any gears. As long as you are careful not to reverse steering motor from -100 to +100 in one step and do some slew control you should be fine. Even with slew control implemented, “switching gears” will be faster or as fast as the pneumatics and definitely faster than what you could get with a servo.
This could allow to “shift” while under load without stopping or slowing down to protect the gears. It could also allow to start in high-torque mode every time robot accelerates and shift into high gear as it reaches 1x speed. This will let you drive heavy vehicles with less motors.
Also, losses due to friction may not be as large as the 2 motor price (for the addition of pneumatics) or 1 motor - for a dedicated shifting or locking device.
If you are already using pneumatics somewhere else on the robot and do not need to shift frequently or under the load, then shifting transmission is definitely the way to go and you don’t have to complicate your life with the worm gears.
However, if you have a heavy robot, do not have pneumatics, and need to get the most out of your motors then you could give this a try.
It all depends on the specific game strategy if you could benefit from the transmission and whether you should choose shifting, locking or non-shifting worm gear based design.