We are very happy to release VEXcode V5 Text Version 1.0. It can be downloaded here:
https://www.vexrobotics.com/vexcode-download
New features for this version:
- Improved code readability by updating the V5 SDK version to use global enums (no :: needed by default) and add default parameters to commands that accepts different unit types.
- Before: LeftMotor.spin(vex::directionType::fwd);
- After: LeftMotor.spin(forward);
- Added 50+ new example projects.
- Added 8 new tutorial videos.
- Added “Tools” menu in the toolbar, including commenting tools, font size adjustment, code formatting tools, and access to advanced API documentation.
- Added Find / Replace features to the “Edit” menu.
- Implemented “Command Help” feature. Accessible from the “Command Help” option in the right-click context menu after positioning the cursor on a command.
- Implemented “Command Reference” feature listing primary API commands via the help panel. Command reference will display commands based on the configured devices in the project. Each command reference command has a simple “copy command” button.
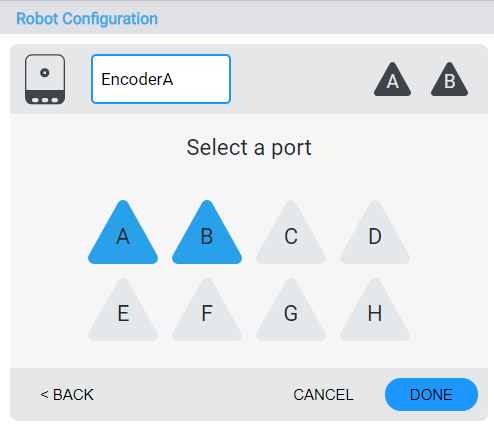
- Implemented Graphical Robot Configuration. Accessible by the Robot Configuration button in the toolbar.
- Implemented a User Feedback feature for users to send feedback in the application.
- Added Simplified Autocomplete for VEX API commands to limit complexity for new users. More advanced users can use the “Enable Expert Autocomplete” project setting in the project details window to expose all API commands.
- Added wait() and waitUntil() macros to match VEXcode V5 Blocks.
- Implemented Light Editor Theme preview feature. To view, change the theme option in from File → Preferences.
- Added a “Project Update” feature to migrate VEXcode V5 Text 0.9 and earlier projects to VEXcode V5 Text 1.0.
Technical details of new features:
- Robot Configuration: Devices that are added to the Robot Configuration panel will auto-generate code snippets required to use the device. These devices will be initialized with the “vexcodeInit()” command.
- Robot Configuration: Device declarations will populate the robot-config.h file - which is a read-only file.
- Project Update: When the user opens projects created prior to VEXcode Text v1.0, the user will be provided an option to “Update Now”, “Update Later”, or “Don’t Ask Me Again”.
- Project Update: Imported VCS VEX C++ and VEX C++ Pro projects will not support the Robot Configuration or the new Simplified Autocomplete features to avoid conflicts with backwards compatibility.
A few known issues with this release:
- Simplified version of Autocomplete will be continuously improved for the future releases.
- Accelerometer is not showing up in Autocomplete
- “Editor Font Zoom Reset” under “Tool” menu on Windows, resets to slightly smaller font than the default
As always, we appreciate any user feedback. If you come across something that doesn’t seem right, please let us know below!
(Filling in for DRow, who decided to take vacation on release day…)