Differential Hood Concept
This is a CAD model I spent a few days working on. I was unable to finish it due to the limitations of my computer. Either way, I came up with this idea a few days after the game reveal when I worked with @Xenon27 on his CI2D. This in tandem with discussions of some strategies with the SCA for what an ideal robot should have for this year and the idea of a trap door came to mind. The CAD itself was made over the course of the early season in bits in pieces because my computer doesn’t know how to cooperate.
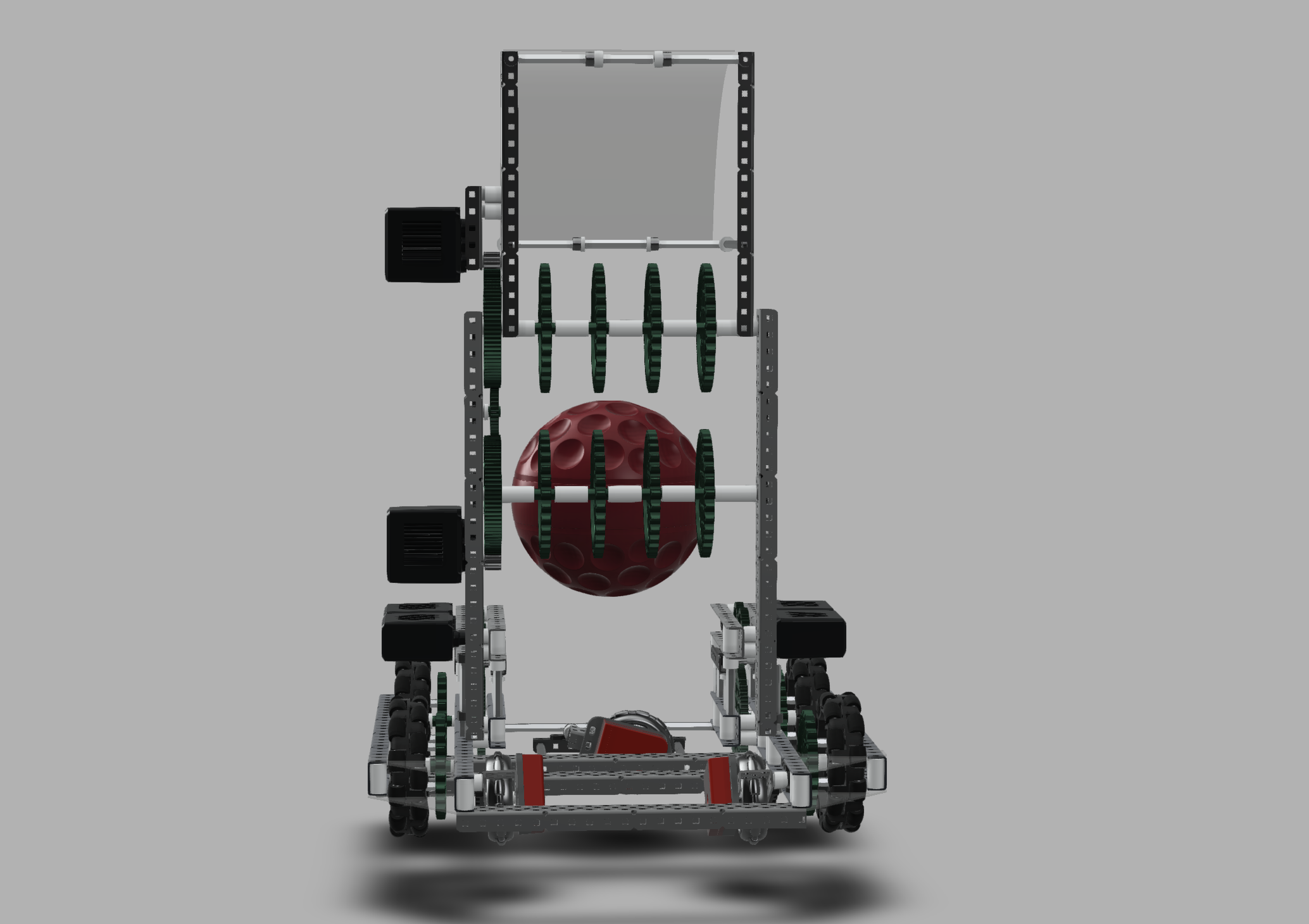
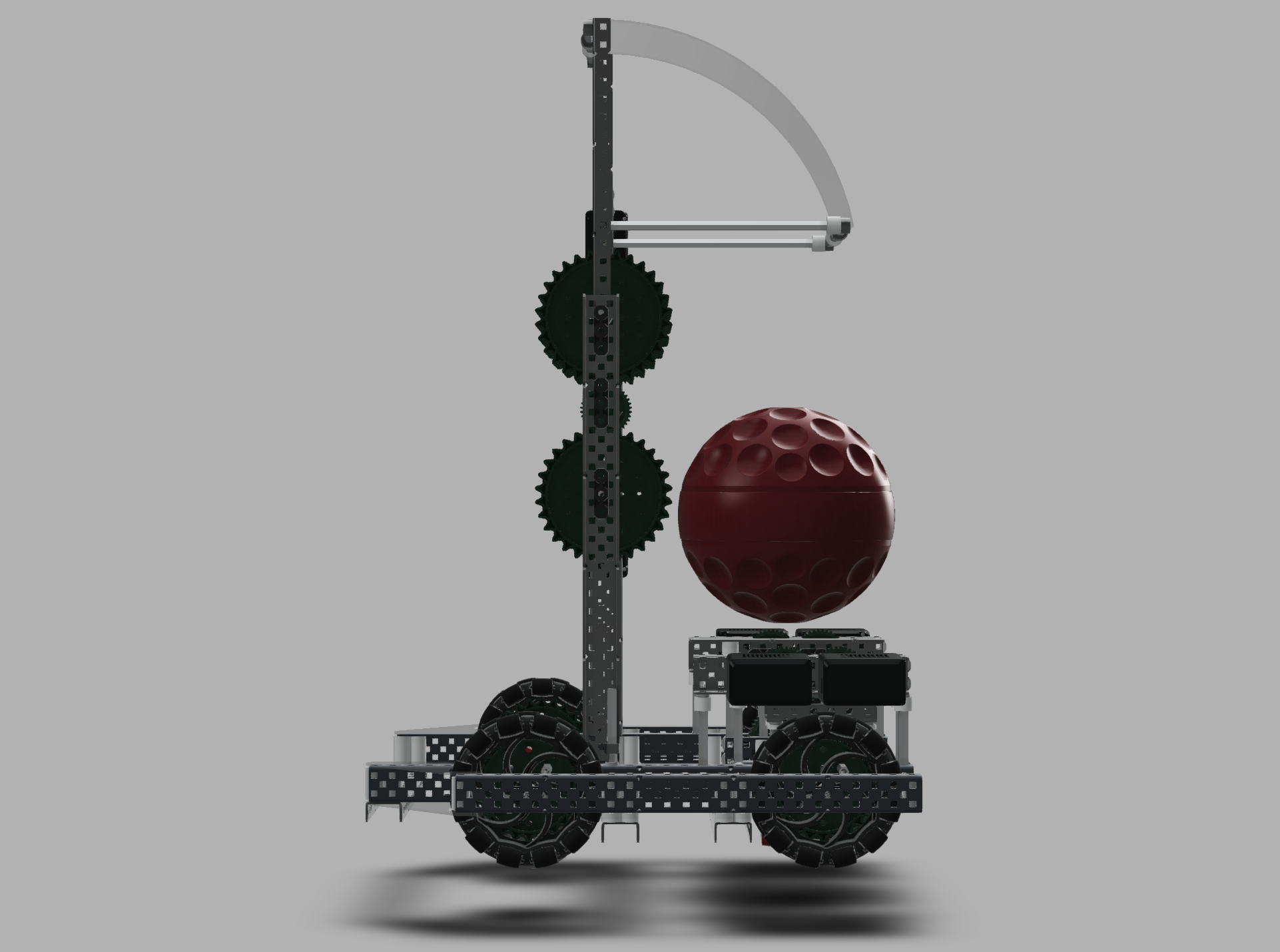
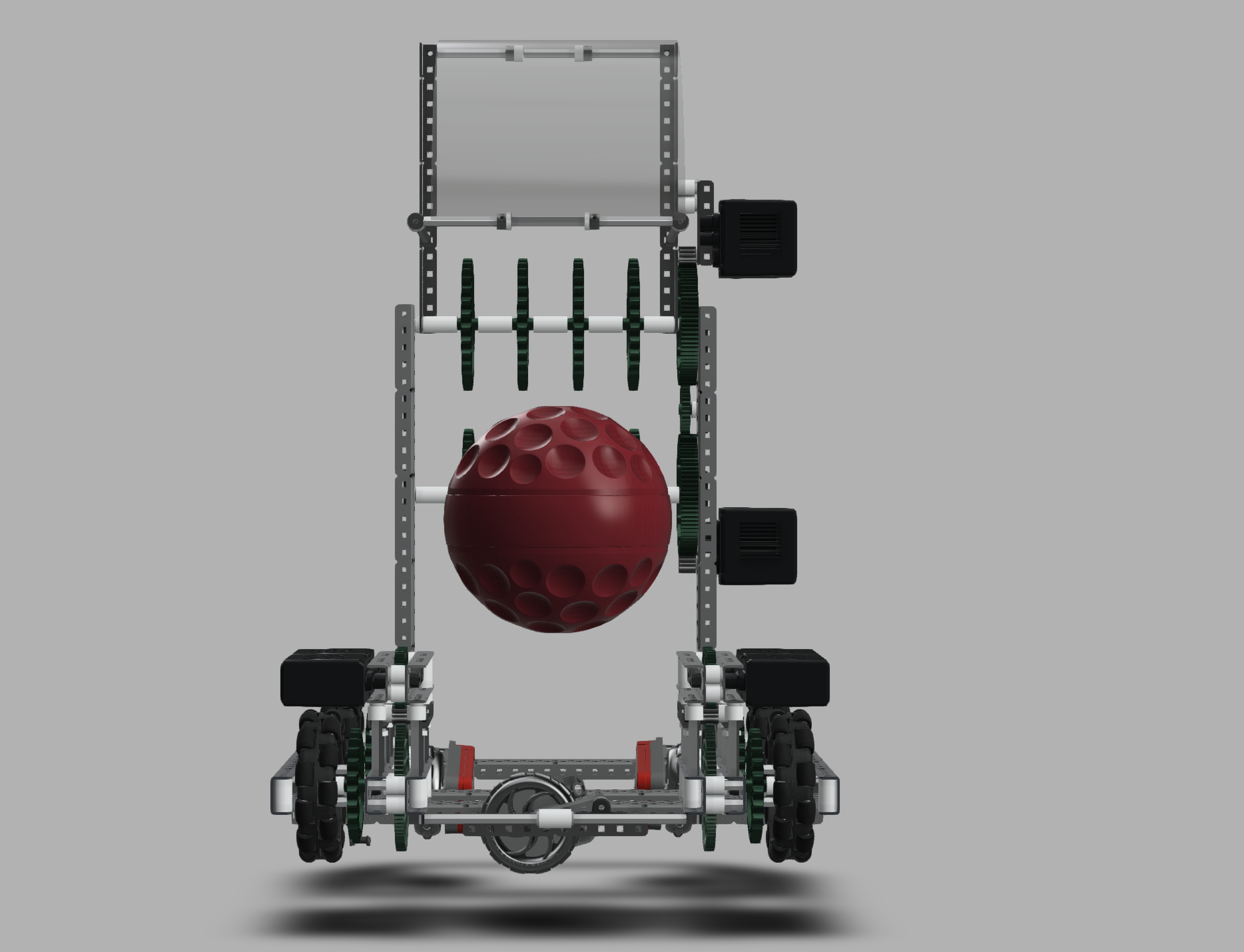
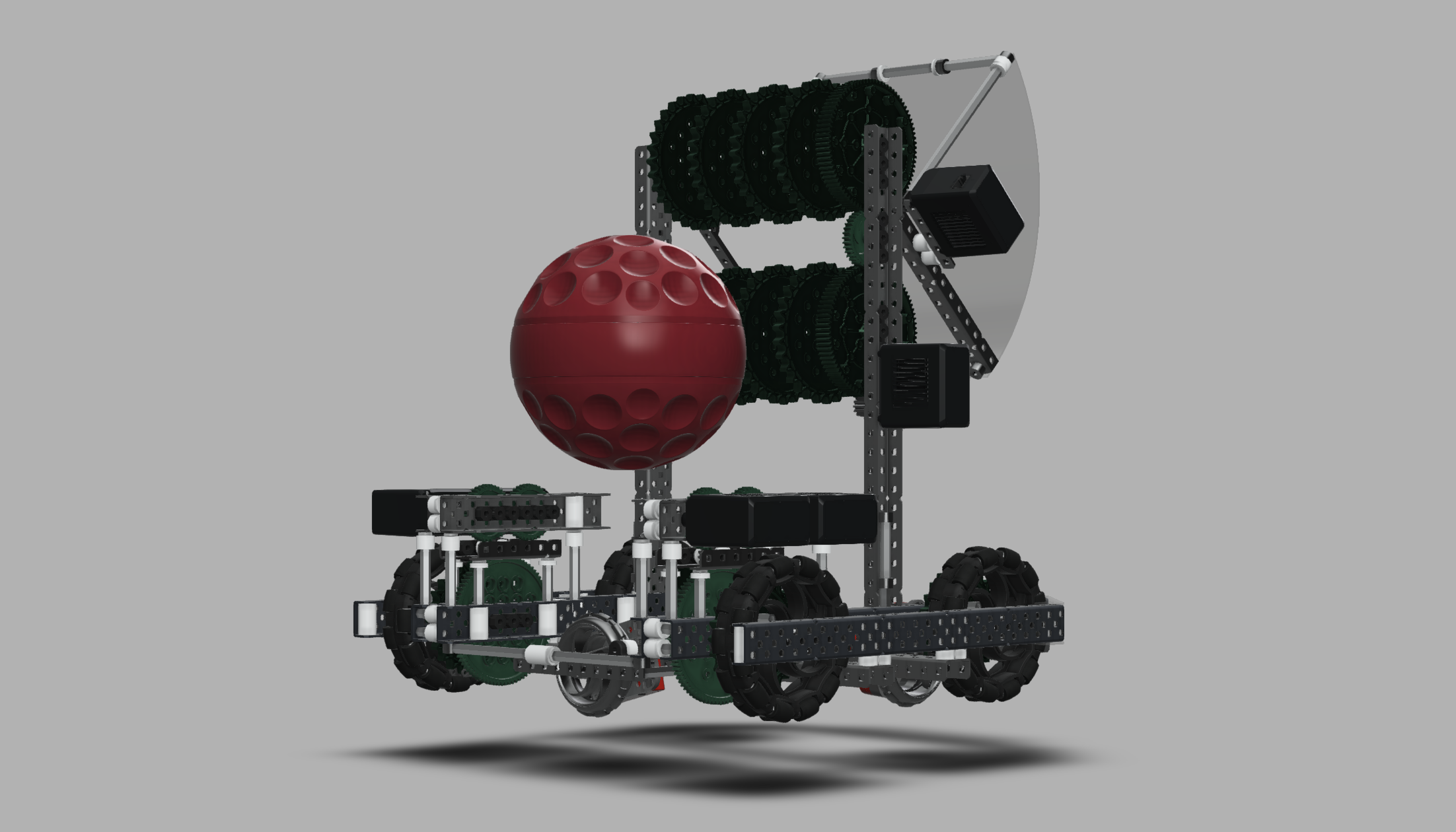
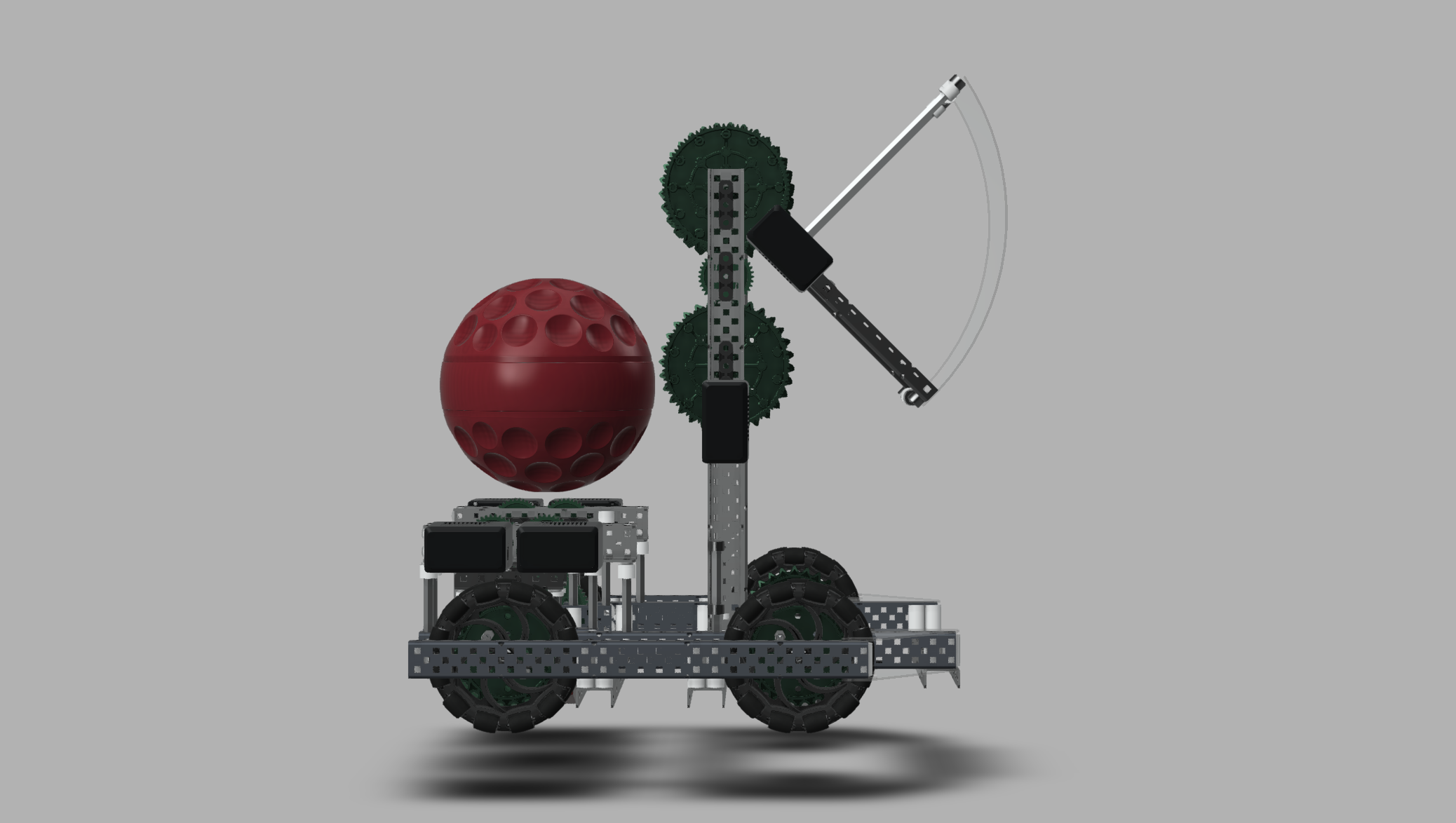
A trap door is essentially a subsystem on a flywheel that passively (or actively) cycles out unwanted balls from within the robot. This enables for an overall more efficient collection and scoring system because the robot does not need to move from scoring position to cycle out unwanted balls. For my particular design, I had the flywheel hood act as a “trap door” so to speak. The balls will be intaked upwards and plopped out the back of the robot when the hood shifts forward.
Inspiration
I was initially inspired by the discussions being had on discord and the forums. My solution was based on a slightly different mechanism, but they were functionally the same. I’m referring to this.
This video showcases late-season 169Y & A as well as 9605a. These teams had angling hoods in turning point and I thought it was an efficient solution for this game given the early season meta.
I also saw the use of differentials and saw how similar the motion of an angling flywheel hood is to something like a chassis to tilter differential or mobile-goal lift to chassis differential. I also knew I wanted a flywheel to be powered by two motors. You can see the overlap here clearly. A hood to flywheel differential seems like a good application for this.
Why a differential?
First is the trap door which was explained above.
Though this mechanism isn’t really fast, it definitely can be with proper tuning. The benefit of using a differential for this is you now have an active hood. Meaning you can shoot balls and change the angle the balls are shot at at the same time.
Additionally, staying within the size limits will be really easy. This wasn’t the main goal behind this design, but it is definitely a plus to consider. You can very easily change the state of the hood.
Design Philosphy
So, when I designed this robot, I wanted speed to be prioritized. I know this game was designed for fast cycling and strategic match play. This is why I chose a hood bot. There is a lot of conversation on the benefits of a hood bot. As can be seen:
That being said, the drive is geared 3:7 on 600 rpm motors. This totals out to 257 rpm on 4" wheels. This seems to be an ideal ratio for this years game, but I wouldn’t be opposed to something faster.
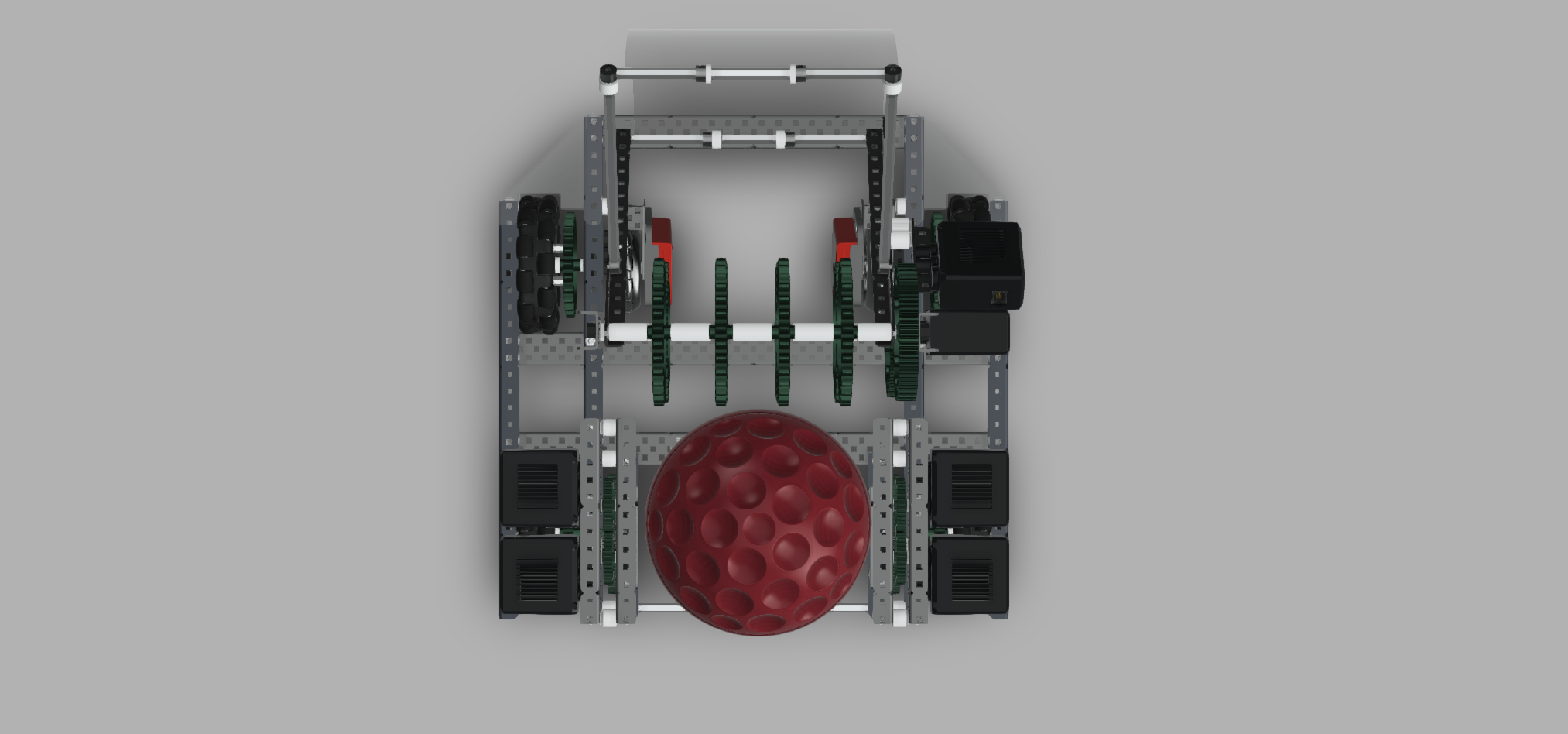
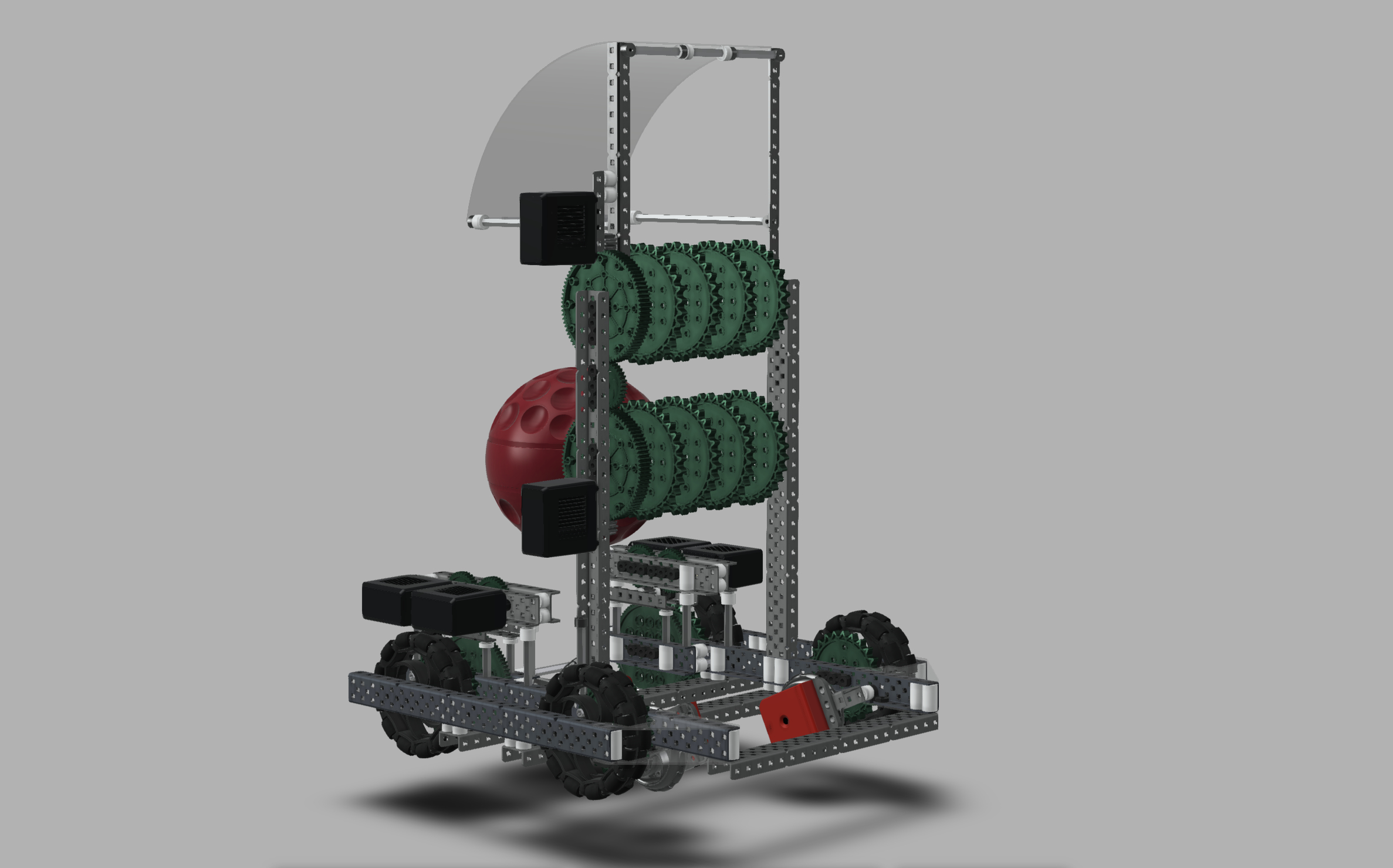
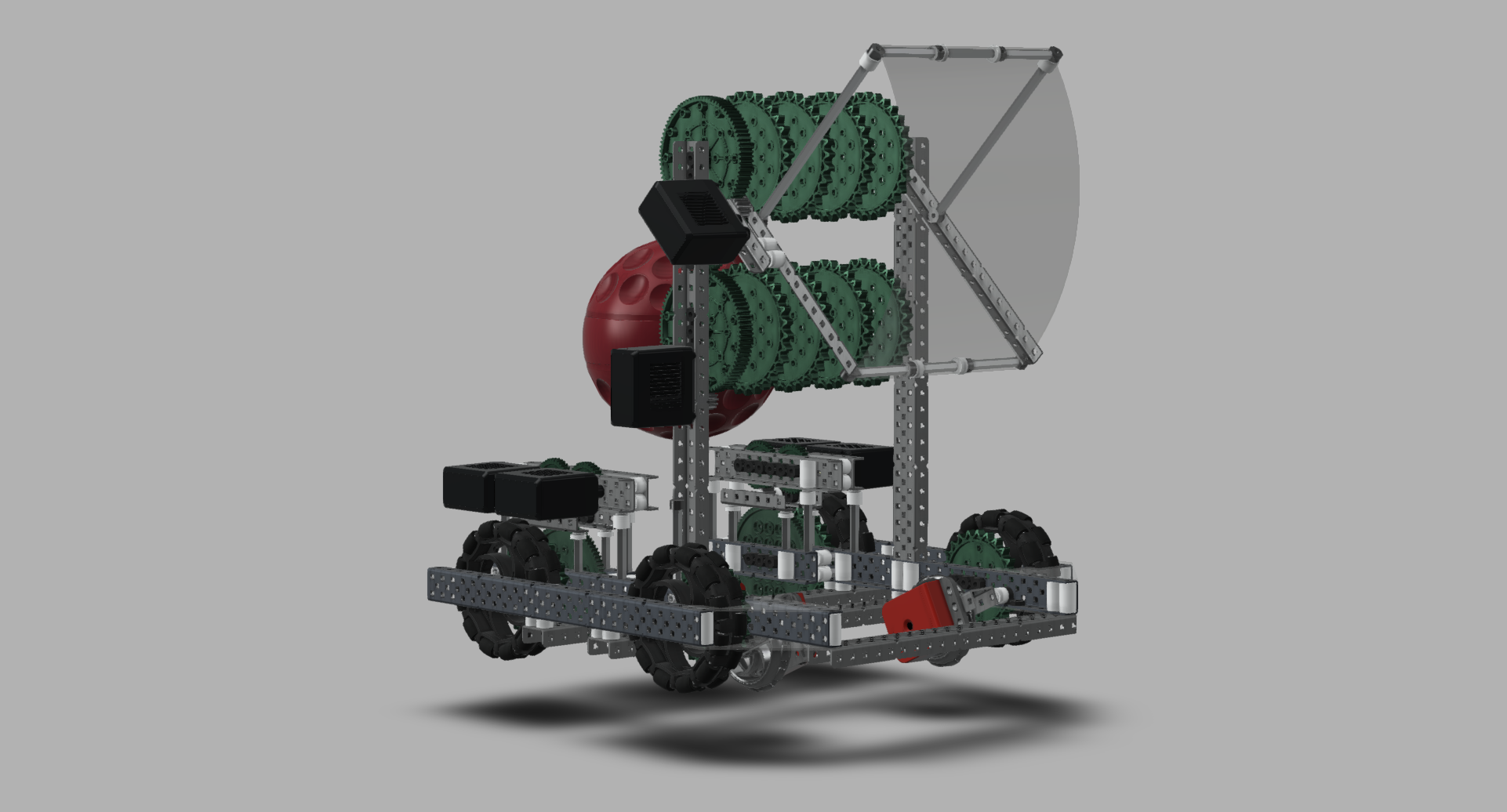
The chassis also features an elevated gearbox that is as space-efficient as possible. This was inspired by the Pilons ITZ robot and 9605a TP robot. This allows the middle of the chassis to be entirely open to the game elements for possibly a greater capacity. There are also tracking wheels. I was just interested to see if I’d be able to fit them on a robot like this and it turns out they fit just fine. This was mainly because I am a programmer, and I also want to encourage others to explore that daunting field.
The flywheel itself is on a differential. Both motors (on the hood and flywheel) power the flywheel at once, or the hood at once. The setup could also move both the flywheel and hood simultaneously but with significant power drops. I believe it will take a good programmer to make this work well.
The flywheel is more of an overall indexer. There are no intakes on this robot, but mainly because that was never the point of this robot. I just wanted this to be a proof of concept for a possible motor sharing technique. The motors powering the flywheel would be 200 rpm making the fkywheel spin at 1400 rpm at top speed, but it might not need to go that fast. Mind you, it is on 2 motors. With good build quality, there are minimal friction losses.
If I were to make intakes, I’d probably get somewhere between 600 rpm - 300 rpm for an ideal ratio. It’s too soon to tell what will be best. I also think omni wheeled intakes tensioned inwards would work well. This is because the intake would adapt to the curvature of the ball as the ball is being intaked. The intakes would be compliant. This wouldn’t work well for fielding, but it’d work really well for descoring and cycling. Just remember W = f*d, do more work with the same amount of force on the ball by covering more distance. I think a secondary intaking system like a scraper would be necessary for these kind of intakes. More on that in another thread though.
Anyways, more on differentials here.
there is one thing to note: *I intentionally made the dimensions of the CAD off in size in a few places that will make this robot impossible to hole count So don’t try it