There were recently several posts by @antichamber showcasing a design concept of sharing motors between MoGo Lift and the drivetreain: V1, V2

He calls it “Passive Mobile Goal Lift” and some people jokingly refer to it as “Passive drive.” Both of those names are, obviously, misleading since both functions are very much active and it just happens that they use the same set of motors. Unlike my previous attempts to use non-shifting differentials, this design is much simpler to understand and build. Here is another version of this idea:

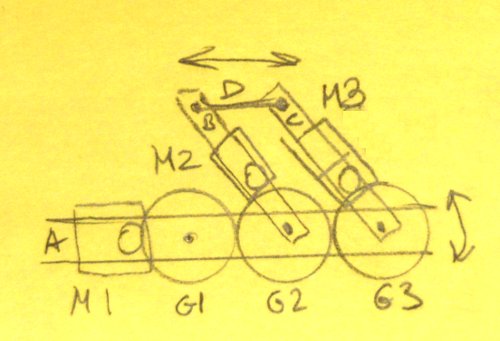
Depending if two motors (M2 and M3) run in the same or opposite direction you have power flowing to either one or another function with each of them getting almost the full power of both motors (minus the friction losses in extra gears).
Outside of the robotics competitions with strict motor rules you will rarely see this type of motor setup. If you have multiple functions you just spec out appropriate motor for each of them and keep them entirely separate for better reliability. It is only here with limited motors you could gain an advantage by mixing up the subsystems to get some fractional motor power here and there.
So, if this is so simple to build, should everyone do it?
Lets take a look at this example: you have a robot with 6 motor drive and a single-motor MoGo lift. You decided to rebuild it as 7 motor drive with two of the motors shared for MoGo lift. The lift gets almost twice the power and now you can lift twice as fast.
The drive, on the other hand, only gets ~15% input power boost and, depending how much friction losses you introduce by adding all those gears, you could have output power gain anywhere between +15% and net negative. If your build quality is poor and you end up losing 20% to friction it, probably, doesn’t make much sense. However, if you could limit your losses to 5%, you will end up with extra 10% power for the drivetrain.
Everyone will not benefit from this design, but if you are one of those teams that strive for excellence and, by the end of the season would max out on all motors, then having extra 10% drivetrain power may let you compress your skill runs by 6 sec and score that last mobile goal. However, you will be paying for this more complex higher performing design with a lot of extra maintenance just to keep its reliability level on par.








