For this next years game i was wondering what eveyones thought are on different drivetrains? Could an h or x drive be viable or will it be only geartrains?
I think the drive-trains will be pretty much the same as the last couple years. 6/8 Omni wheels with 6 motors. They just seem like the best option so I wouldn’t be surprised if it’s the meta drive-train again.
I wanted to do an x drive train they have great manerability but there traction isnt the greatest .
my team is using something similar to x-drive bit not x drive lol, it is also completely field oriented do forward is always forward.
(I am biased tword H-drives, to take my two cents with two cents-worth of salt)
I think both H-drives and X-drives will be great for this game. Since you would need to use many half-motors for a 6m X-drive. I think H-drives will work well this year. Also, if you are using a change-up style robo like @9motorgang’s robot, you could fit a PTO in there and still have pleny of space for the blocks. If you are planning an a 4m drive, x-drives will be easier, but a 4m H-drive would let you designate a motor for the H-drive.
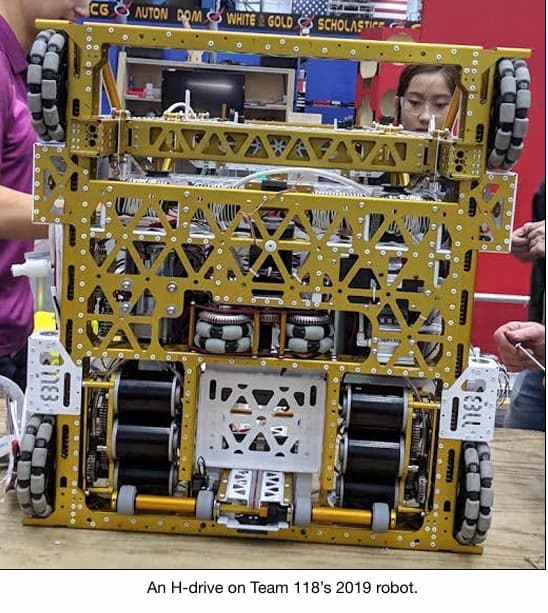
If you do use an H-drive, I would do it like this:
1417R RachmaniBOTS Robot Reveal scoll down to the H-drive section.
If you have any questions on the “Deca-drive” please let me know and I will share what I know.
I think that it’ll still be like what last years was. Other types of drivetrains are either hard to code or worse
I think meta will probably revolve around a 6-motor 600 RPM drivetrain. This game relies pretty heavily on maneuverability, and driver skill from the looks of it, so speed seems necessary as well. An H drive might make it difficult to get over the lip of the parking zone, depending on how it is made, and it also just might not be that helpful to have sideways motion in this game.
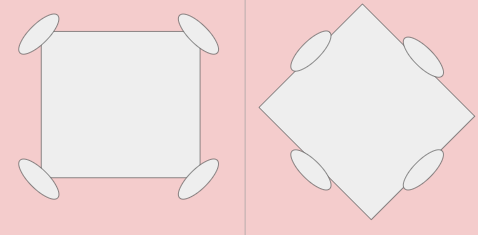
X drive, but oriented 45° to make it buildable without those horrid angles.
So personally i am not a builder. Is there any way you elanorate. That would be great.
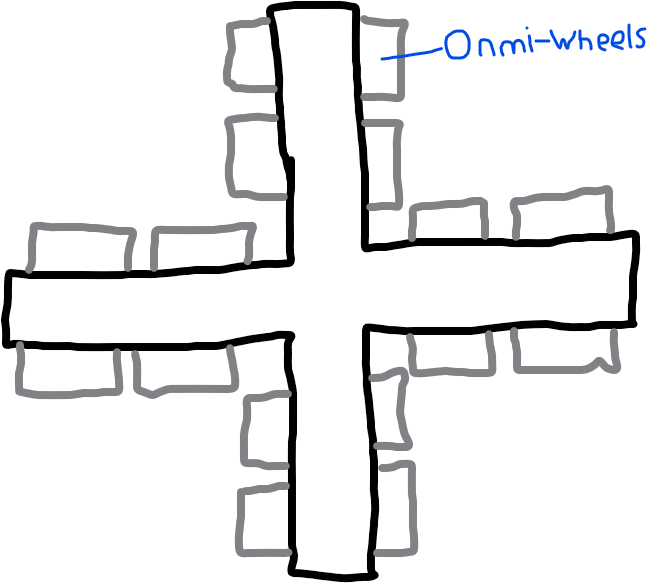
I imagine it would be similar to a + shape instead an x shape
I can relate to your hatred of building angles ![]()
Why does something so painfully to build have to add so much strength
I think you could use 6 wheal X drive. Hear me out, if you have a standard X drive bot, and add 2 wheels in the middle, like 2/6 wheels from H drve, you should be able to get more traction, and have more front back power then a standered X drive.
I would love to see how a drivetrain shaped like a + would work. I would appreciate if you were to explain your thoughts on a drive like this.
Also, welcome to the forum!
But in an x drive, all the motors are being used when the robot is pushing forward. In a plus shape, only half of the motors are pushing forward - hence why no one to my knowledge uses it.
I think the + shaped drivetrain would be a +, but with the wheels on the end. The configuration would be similar to X drive. At least that’s what I think
I think that for this year having some sort of x or h drive is a no brainer. Imagine trying to park a car in a parking lot and messing up the angle. You then have to reverse and try again. That will be happening here but tenfold because of how fast drivers need to be. With something holonomic, you don’t have to worry about that. Especially if you code the robot to help you line up with the goals.
This is what I was thinking too, but the last few years tank drive has been pretty dominant so I don’t think that’ll change anytime soon. In early season High Stakes a lot of people thought x-drive was the way to go, but by mid-season pretty much everyone switched to tank, so i think the same thing could happen this year.