Some more results.
I was not happy with results from the simulation yesterday, the shape of the measured response does not match the simulation, the current seems to drop more quickly than the simulation would suggest it should. I played around with some of the variables and, although I can not get a good match in every case, I have modified the following
stall current 2.88A (this is more in line with the latest real world measurements)
the new stall current give a motor resistance of 2.5 ohms (yes that’s deliberate), my motor measures at 2.4 ohms.
motor inductance 650uH, down a little from our first guess.
system resistance 0.3 ohms.
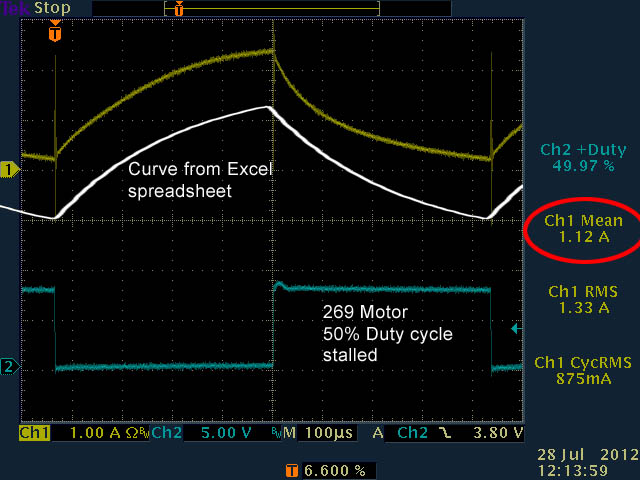
Yesterdays 50% duty cycle, stalled condition now calculates to be 1.136A, still close.
using these values I have the following additional results.
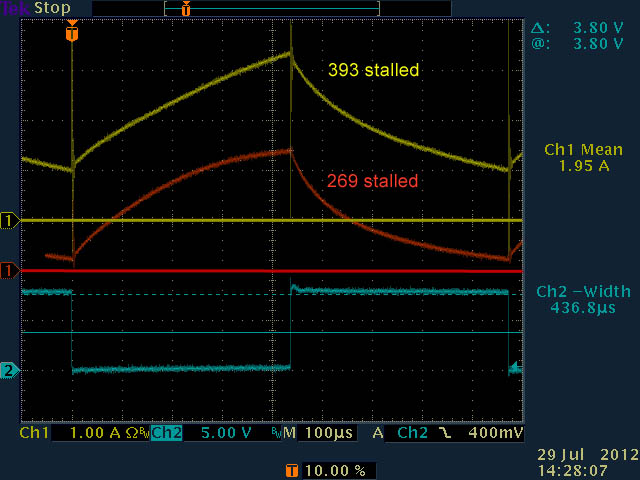
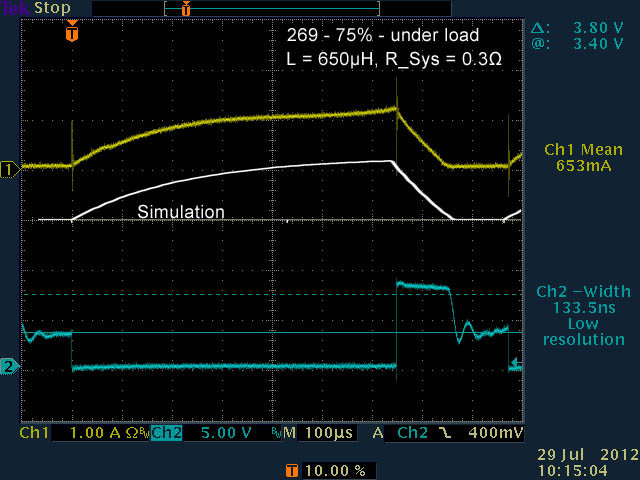
75% duty cycle under load (bemf = 3.8V)
calculated current 651mA
measured current 653mA
(ignore the CH2 width measurement, it’s wrong)
Also don’t forget this is low side switching of the H-Bridge so the blue voltage going low is the on phase, the dotted blue cursor is the nominal battery level and you can see the diode voltage slightly above that.
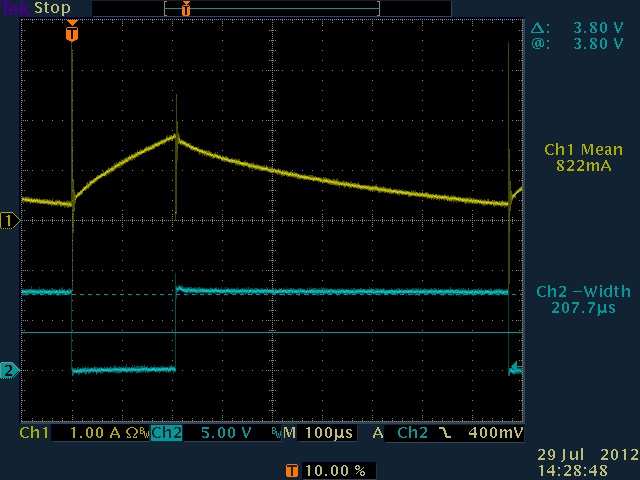
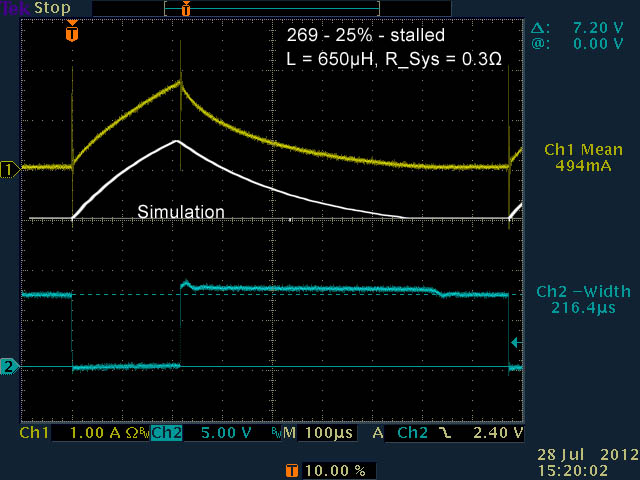
25% duty cycle stalled.
calculated current 484mA
measured current 494mA
25% duty cycle under load (bemf = 3.0V).
calculated current 174mA
measured current 252mA
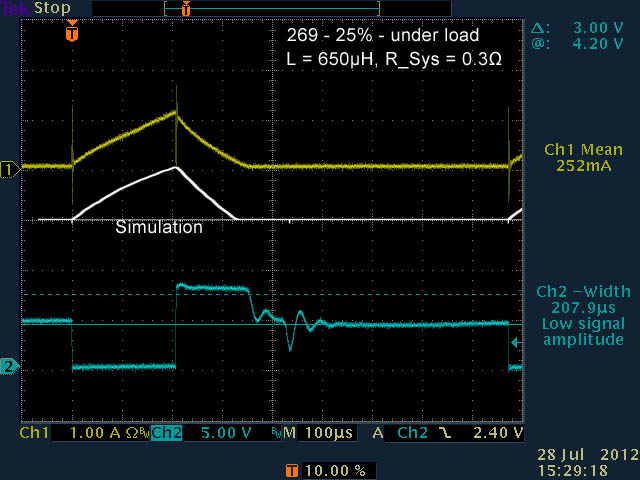
A little off in that last example but it may also be the scope calculation that is in error. In general I think these numbers are reasonable, the motor does not behave exactly as the model in other respects, sometimes the current waveforms are quite distorted due to mechanical factors. The motor obviously has brushes and a commutator and disturbances can be seen due to these. Here is another example with the motor at 75% duty cycle as in my first example.
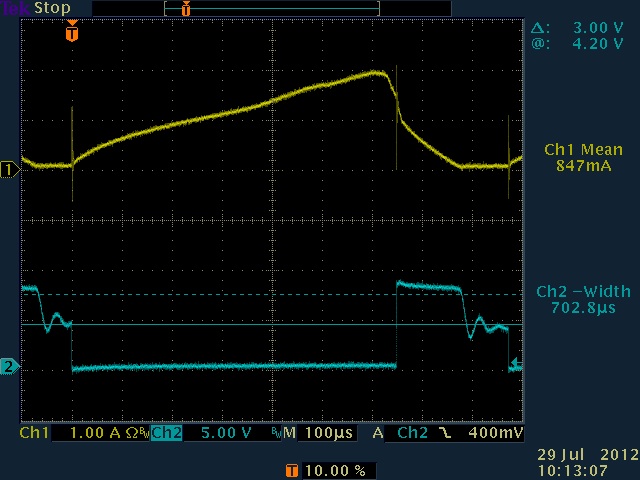
Quite different with the current measuring as 847mA, same test conditions just captured on the oscilloscope a few seconds earlier.
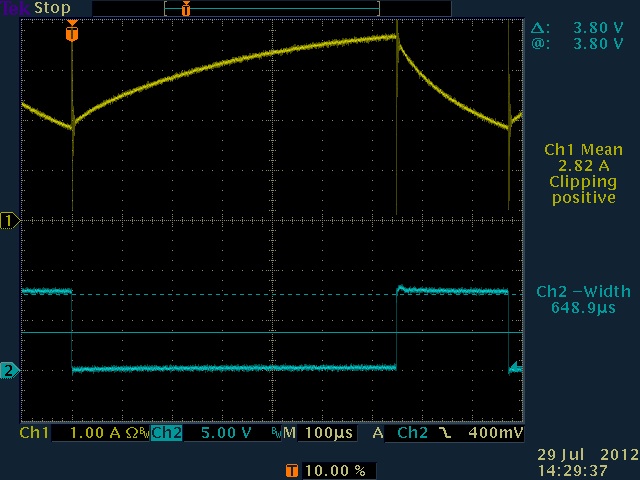
And a final example to highlight the current disturbance due to (presumably) the brushes and commutator.
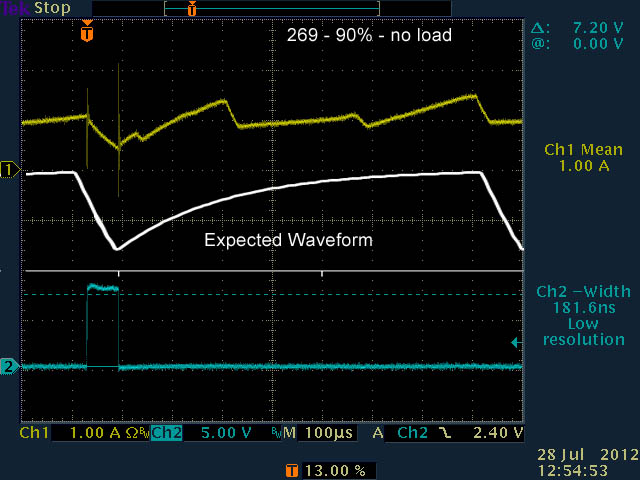
motor running with a 90% duty cycle. I show the simulated waveform in white, the measured current is in yellow.