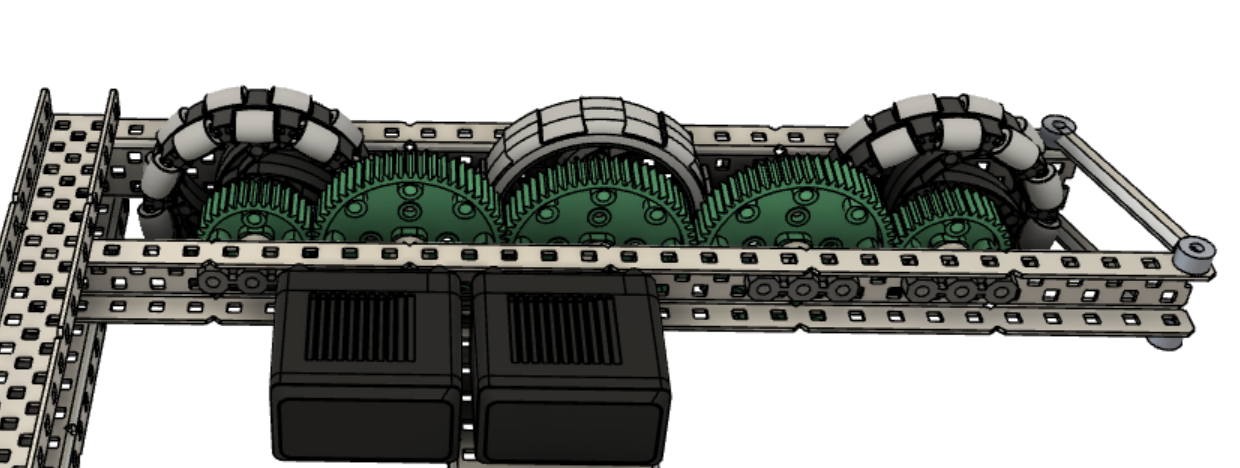
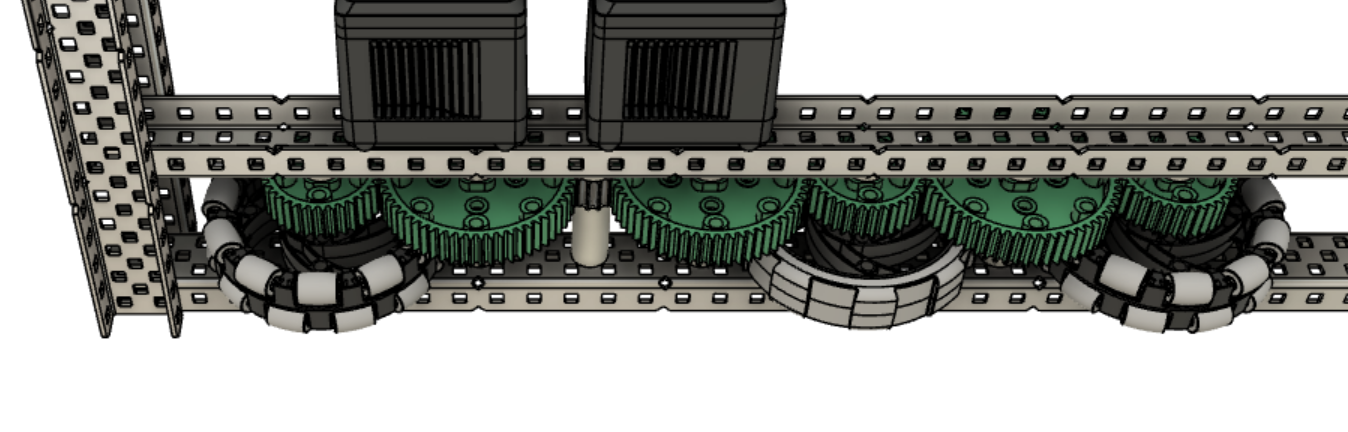
With this one, though, the traction wheel is way off center, which isn’t very good. Would it be okay to use the design from the first picture, but just use a free spinning insert on the middle traction wheel, so that it isn’t powered?
that would be just fine. The wheel will of course not be powered if it’s free spinning, but that isn’t an issue unless you need to go over a bump or something. But that’s game-dependent, on a flat field you should be fine.
One thing you will need to look out for with that first design is that one of those motors is going to have it’s port facing inwards, and you’re not gonna be able to fit the cable in there with those motors so close.
Motors in that configuration can actually fit a cable between. As long as you either have quickswap on all your motors or mount the motor in with the cable already attached you should be fine.
wow really? seems like you would have to bend the cable at an unhealthy angle, and that’s only if the cable connector itself fits. But I’ve never tried to put motors like that so if it does work then I guess its not a problem.
One additional thing to consider when building a drivetrain is a conversion of weight of the robot into pushing force through the friction.
If all wheels are powered, then the full weight of the robot gets converted into pulling or pushing force through the friction coefficient specific to the wheel type and surface that it is driving on.
However, if free spinning wheels support portion of the weight, then it reduces the maximum force that is available to accelerate, push, or resist pushing of the robot.
As far as the placing of the wheels is concerned: if the robot’s center of mass coincides with the geometric center between traction wheels, then driving is going to be smooth and predictable.
It doesn’t matter if omnis are not the same distance from the center - you will be fine as long as all powered wheels on each drive side are aligned on the same line and have the same surface speed.
It is very easy to prove with a simple geometry of the velocity vectors, but I cannot find an illustration at the moment. Please, beat me to posting one.
do 36 - 60 - 36 - 60 - 36 and place the wheels coaxial with the 36t gears?
Or you can try out 60 - 36 - 60 - 36 - 60 on 600rpm motors, and place the 3.25" wheels with the 60t. This will be 360 rpm (close to 333). It has the same number of each gear (same track length), and have less slop since you’re gearing up
I think this is a very important factor when selecting drive ratios that almost everyone overlooks.
Even using gears and eliminating all axle to wheel slop, you can’t eliminate the slop from the motors themselves. If you gear your wheels up from your motors, you’re just amplifying that slop, which in the case of 3:5 200 rpm ratios, actually comes out to be about half an inch of slop linearly, and a good couple degrees of slop when turning. The linear slop isn’t as big a deal as the turning slop, since turning just a few degrees off can drastically change your robot’s path, but both types of slop in this ratio will be enough to potentially cause issues with autonomous accuracy. If you use tracking wheels you can get almost perfect measurements, but your actual motor spin commands will suffer from error due to the slop. (there are ways to mitigate slop within code, but it’s difficult and you’re better off solving this mechanical issue with a mechanical solution rather than code).
By comparison, gearing down a 600rpm cartridge will reduce the slop instead of amplifying it. If we assume that both 600rpm and 200rpm cartridges have the same amount of slop (from some basic tests I’ve done they are at least very close in slop), that means that you’ll have only 36% of the slop with a 600 rpm 3:5 ratio than you will with a 200 rpm 5:3.
So it cuts the slop almost to a third, with a very comparable drive ratio (600 rpm 3:5 is 8% faster than 200 rpm 5:3).
If I were to redesign that standard drive I made in this topic, one of the changes I would make is to change that ratio for less sloppy wheels.
This idea of gearing down the slop doesn’t just apply to drives too, it can apply to other subsystems where slop is a concern, like a lift. If you gear 200 rpm 1:7, you’ll get a speed comparable to 100 rpm 1:3 (about 14% faster), but with only 42% of the slop.
I think it’s an important thing to consider when selecting a gear ratio, and in the case of a drive, I think it’s just as, if not more important than the speed of the ratio itself.
This post is getting rather long now, but while I’m on the topic of overlooked factors in drive gearing, another thing to consider is reducing the speed of the gears as much as possible for as long as possible.
what I mean by this is that a gear spinning more slowly will encounter less friction than a gear spinning more rapidly. so by structuring your ratio in such a way that is minimizes the sum of the speed of its gears, you cut down on the friction.
for example, say you want to have a 600 rpm 3:5 ratio.
One layout you could use is:
60 - 36 - 12 - 36 - 60
with the 600rpm motors on the two 36t gears.
This layout is not ideal because that 12t idler will be rotating much faster than, say a 60t idler would, because of course 36/12 is much higher than 36/60.
going like this:
60 - 30 - 60 -30 - 60
would be more efficient because the sum of your gear speeds will be less, and therefore you will have less overall friction.
I’m not sure exactly how much friction you reduce by optimizing in this way, I would think less than just basic things like lubrication, screw joints, drilling out holes for axles, and all that, but it could be something to consider if your drive has the kind of flexibility to change up the size of idler gears.
I think a general way to exercise this principle is just by selecting larger gears over smaller ones when it comes to idlers, since a small idler gear will just inherently rotate faster than a large one.
it could be worth investing in 600 rpm cartridges in the future, they have a lot of uses, but I wouldn’t say that its a crucial thing. The slop, while significant, is not a deal-breaker for 200rpm cartridge drives by any means, and 200 rpm 5:3 will still work just fine.