I’ve seen teams using gears running upwards in order to mount the motors above the wheels. How would I do this while leaving enough space for 3 odom wheels (one horizontal and two vertical), also, I want the chassis to be 30 holes in width or less. The motor needs to be mounted into a plate, which is what I am finding the most difficult to think of. I have no way of doing any CAD and I can’t build anything yet. I want to use 60 tooth and 84 tooth gears for 280 rpm.
This might be handy for you
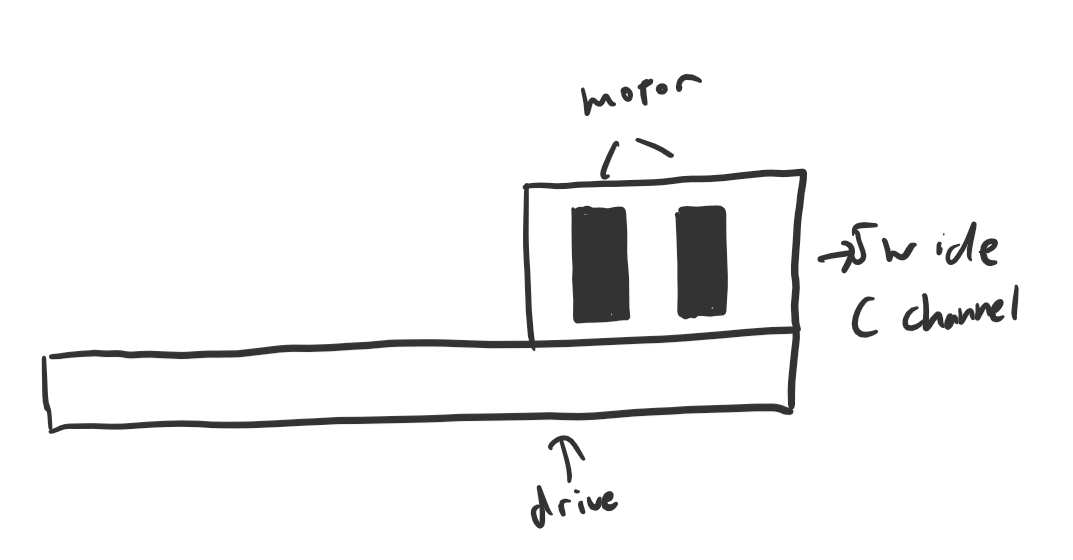
You’ll definitely have space for 3 odom wheels with a 280rpm drive (I was able to fit 2 in a 25x25 base). Just start designing the base in a cad program with the requirements you want (280rpm, 30 holes etc.), and start to figure out spacing for things like odom wheel. Mount the motor on a cut 5 wide c channel rather than a plate
There are free cad programs like fusion 360 or inventor which you can use, so you should be able to get these and cad. If your computer is too bad to run a cad program, try out onshape which is done over the internet
1 Like
Are you willing to share any pictures of you’re chassis?
But how would I mount the motors above the wheels, there needs to be enough space in the centre (about 15 holes), motors cant go in the middle of, and have to be mounted towards the back (I need a lot of space in the front and mid sections).
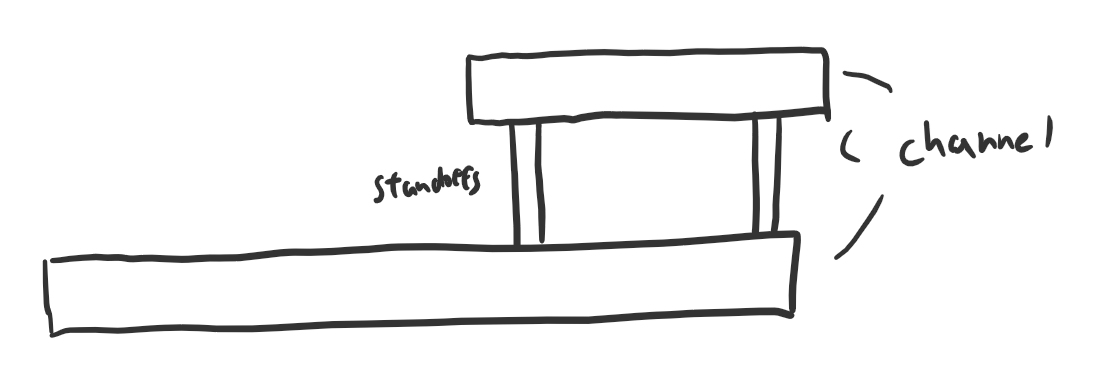
I’ll apologize for my mediocre drawing skills, but just connect the motors with gears in another c channel, then extend one of the shaft to the main drive part, then you can get a lot of space in front while putting the motors in the back
2 Likes
Will the amount of gears not increase slop by a lot? And what gear ratio is the first image?
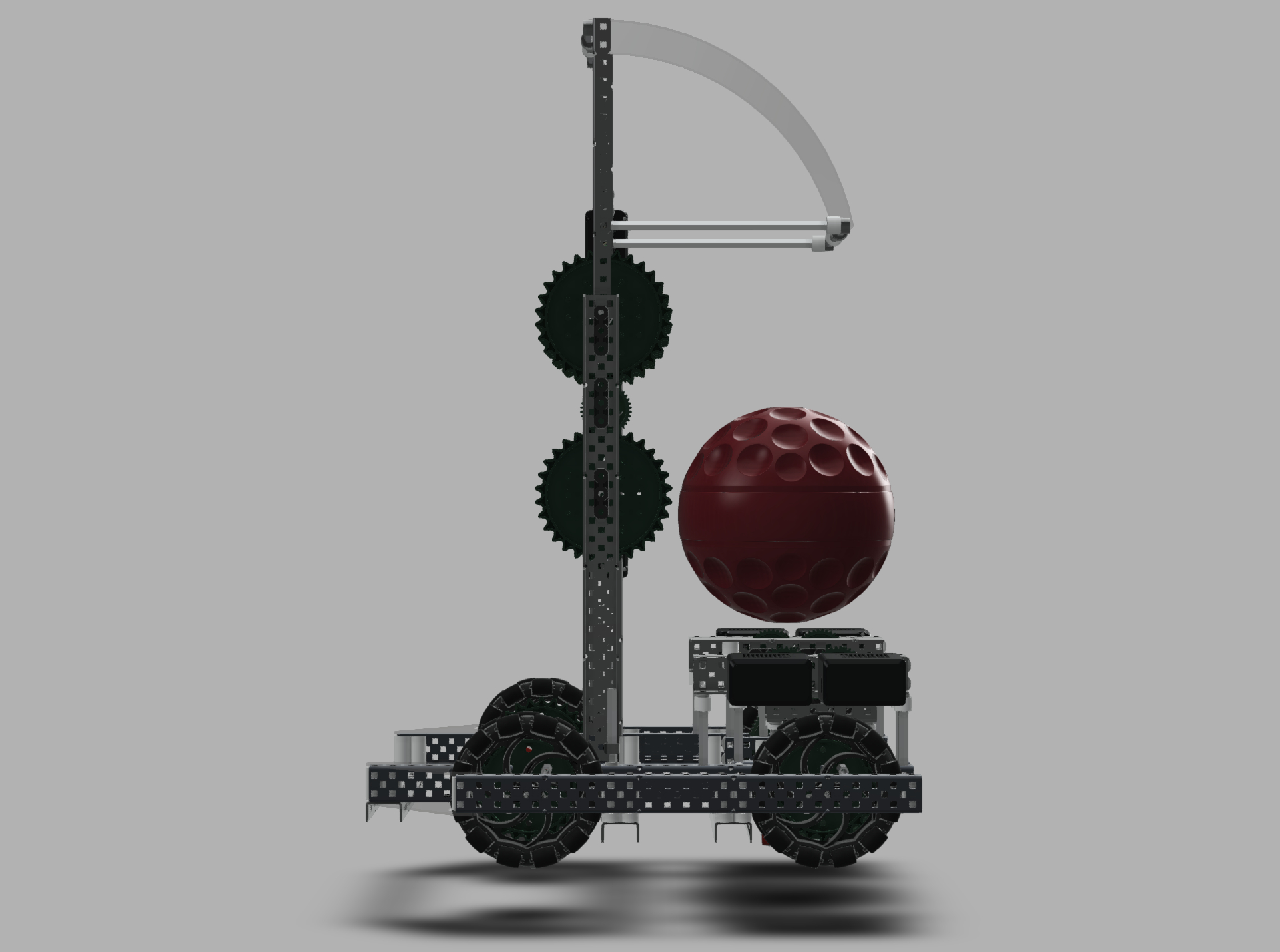
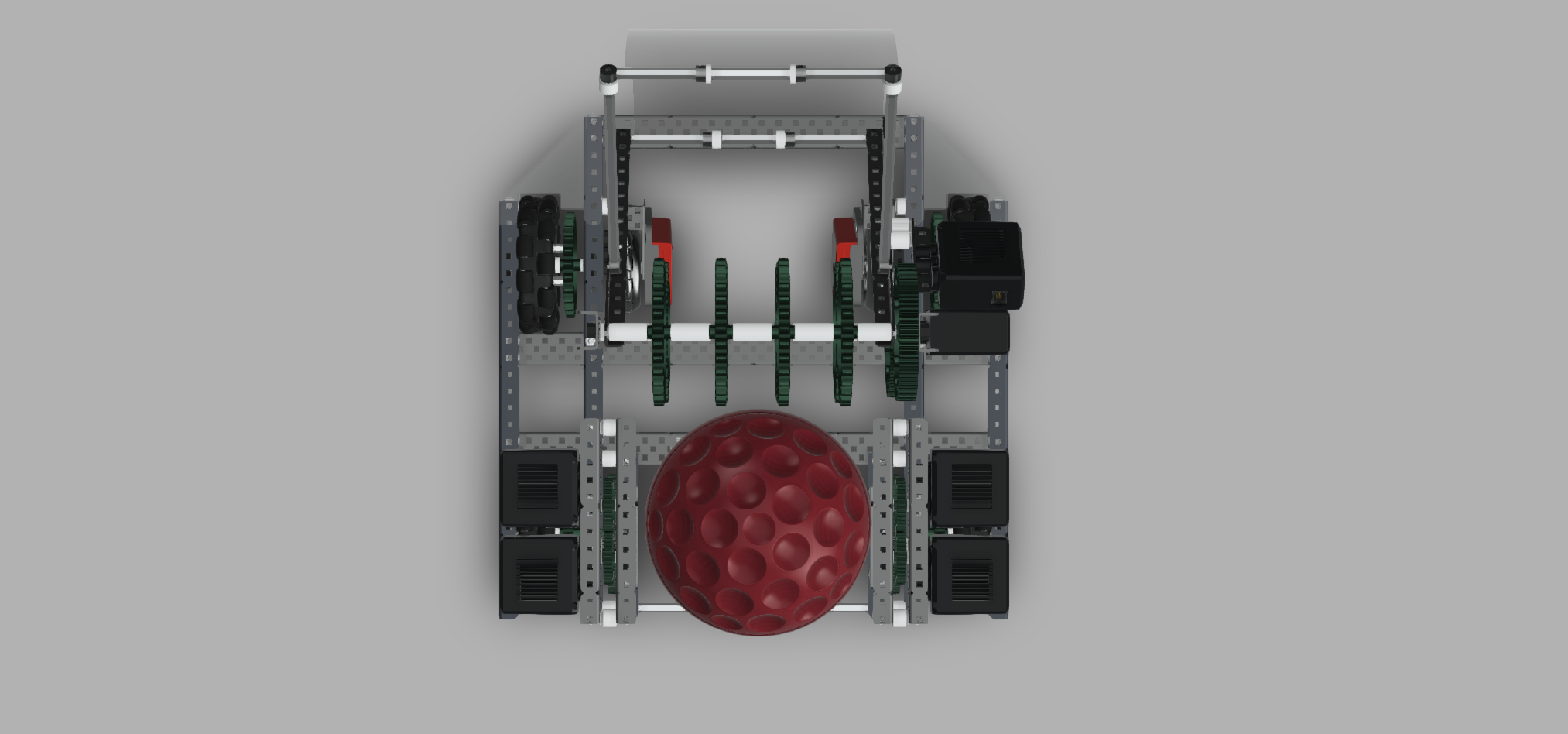
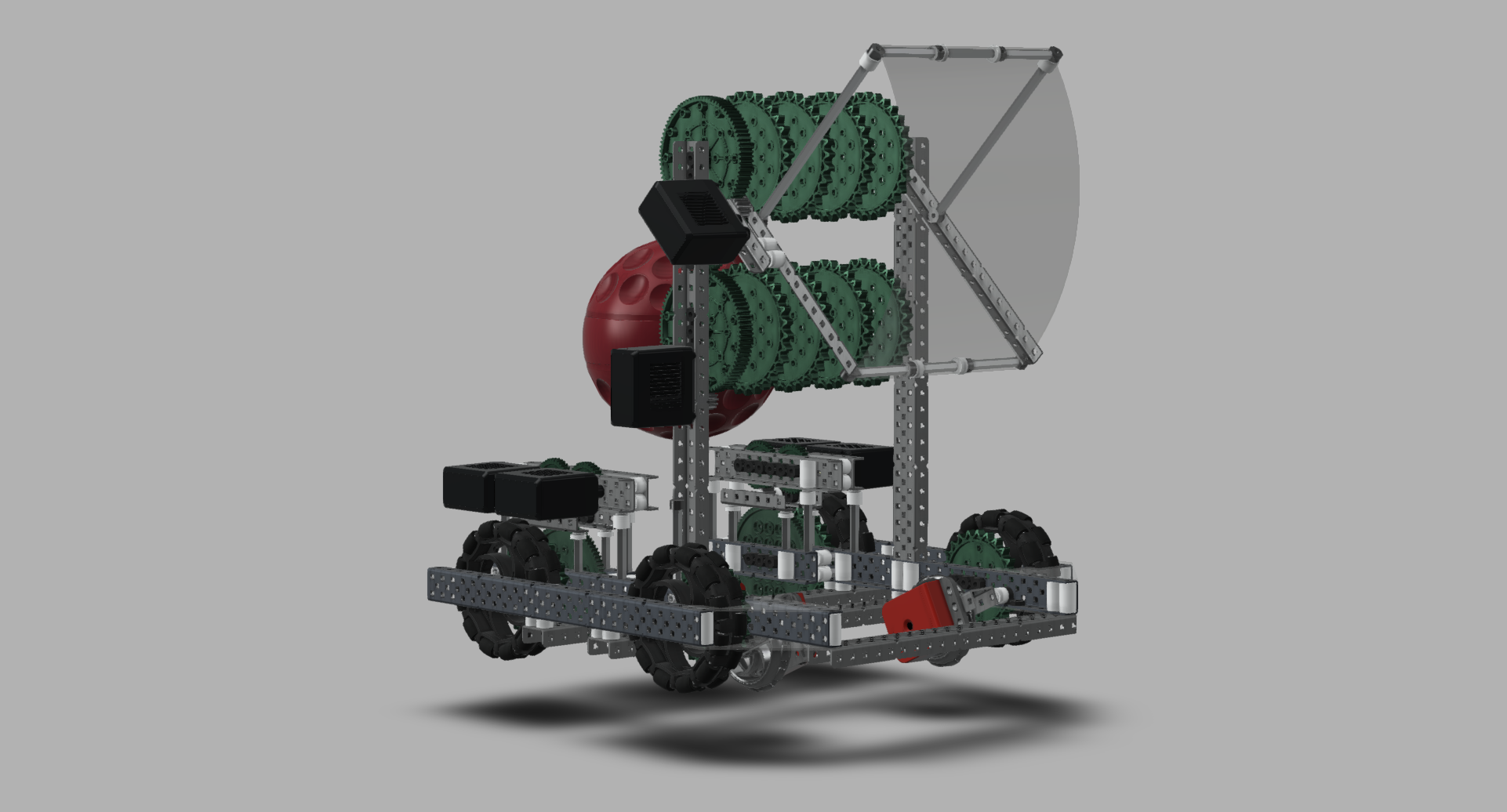
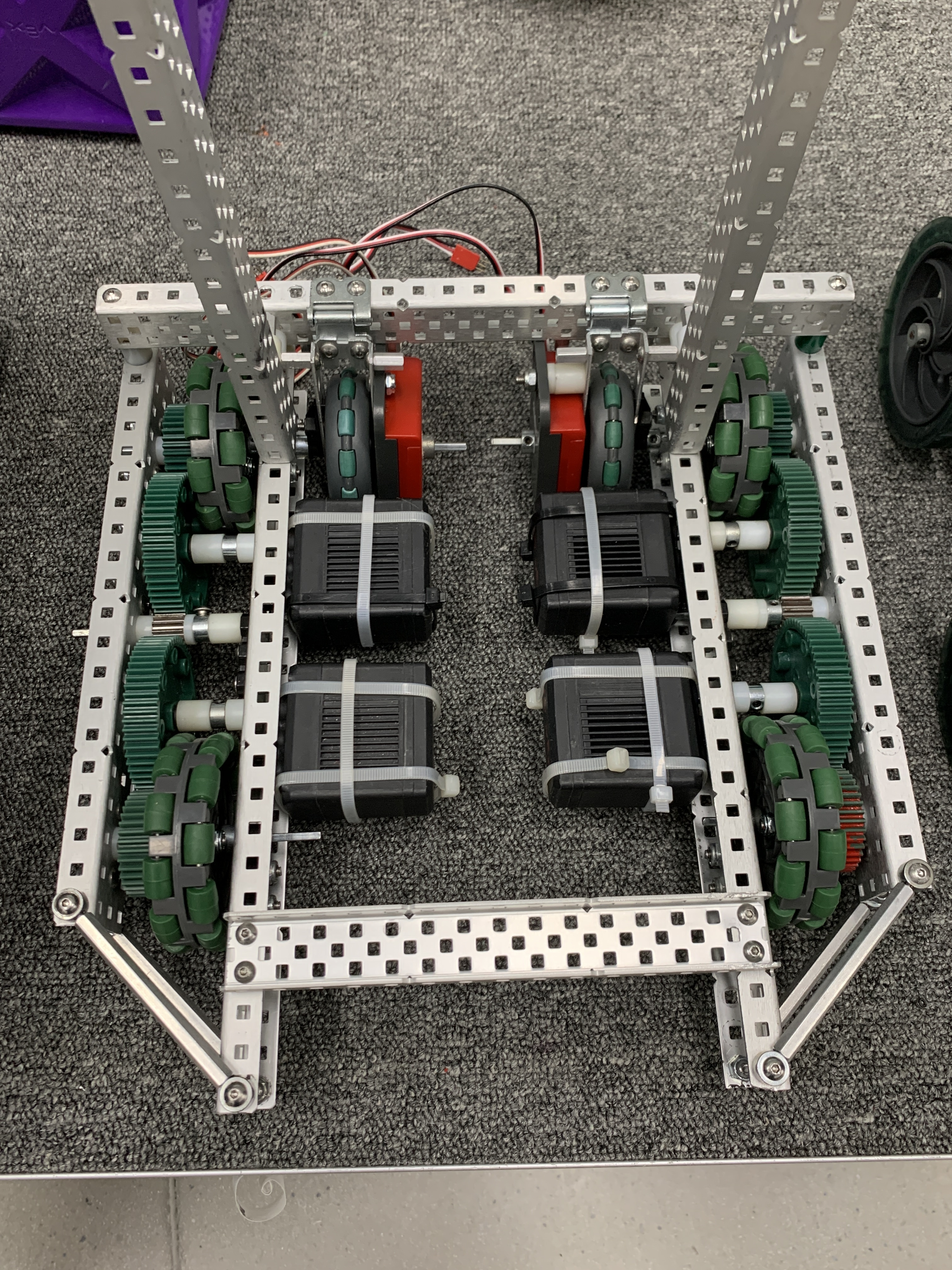
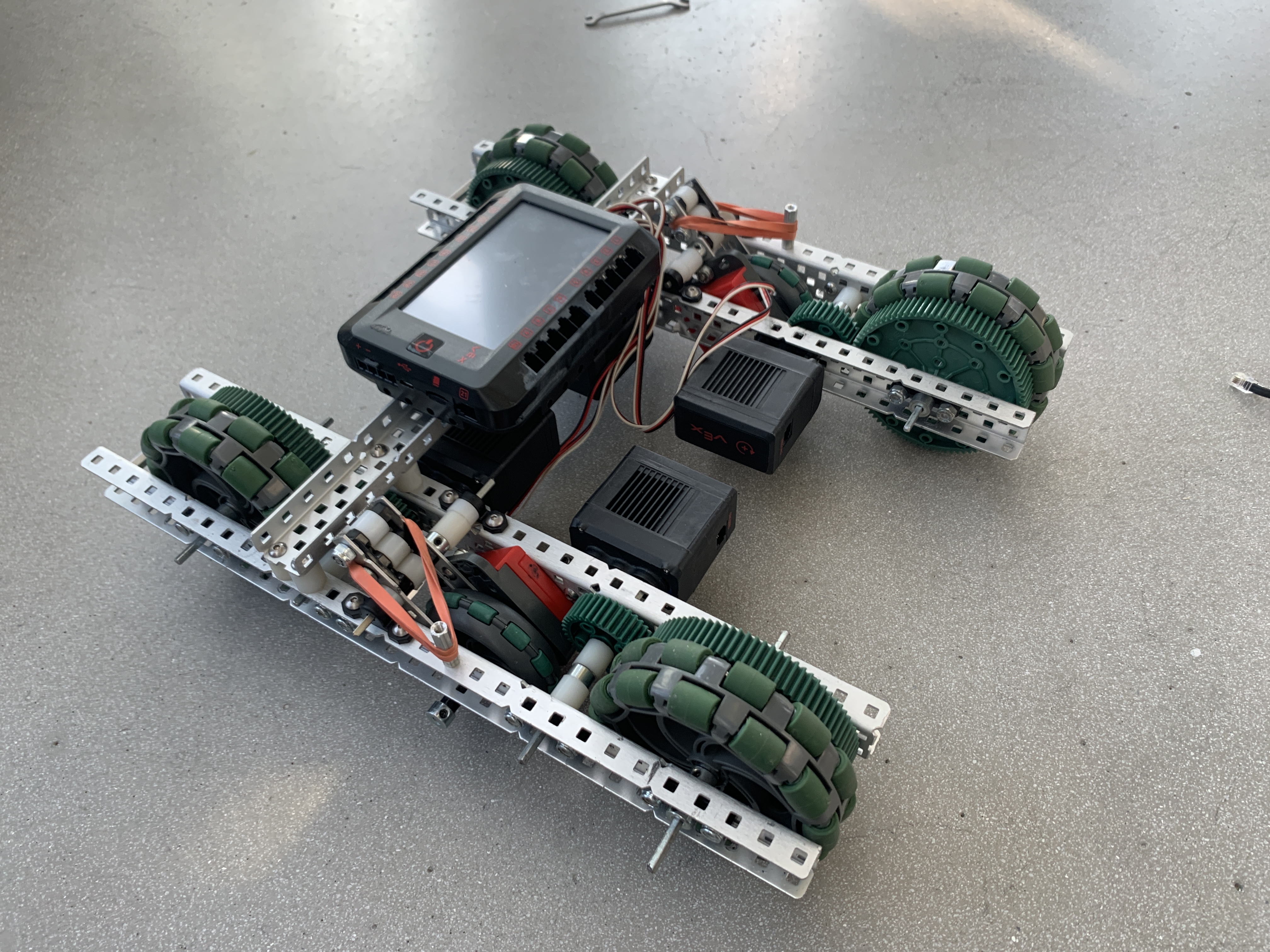
The images are of a robot I designed over the summer. More details on it here:
2 Likes
I really want to power both wheels with a maximum of 2 gears/ sprockets per wheel, I feel like the slop is really bad when you add to many. Is this not an issue if I use the tracking wheels? (Sorry if I come across as picky)
If you have a lot of slop with your base gears, its probably due to your build quality. You can probably try out something like this? (mount motor at back, chain to front)
Its probably gonna have even more slop than using 5 gears though, I’ve seen well built 5 gear drives which works really well
2 Likes
I’m kind of worried about chain though, I’ve seen lots of chain snaps in the Tent VEX matches.
Lets make a quick list of some of your base requirements
- 280rpm
- Motors at the back
- Each wheel is only connected with at most 2 gears
- No chain
These are already a bit contradictory. If your motor is already at the back, you will need some way to transfer the power to the front - either chain or gear. You can’t use chain since your concerned about it snapping, and you can’t use gears since it will take more than 2 gears to transfer power to the front.
Tbh both options are equally viable. I used a chain base last year and it only snapped once throughout the whole season, and it was because I didn’t clip the chains in properly before the match, just make sure that the chain is not too tight and it will be fine. Gears are also a nice option as it has less slop compared to chain. The slop doesn’t really add up after adding more gears unless you have bad build quality.
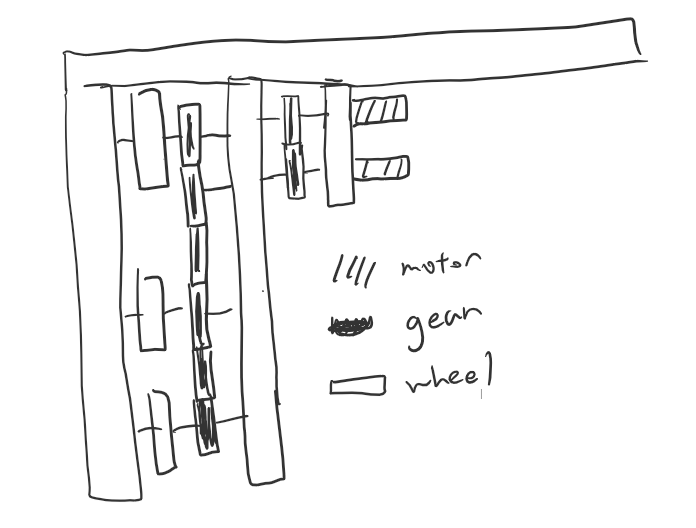
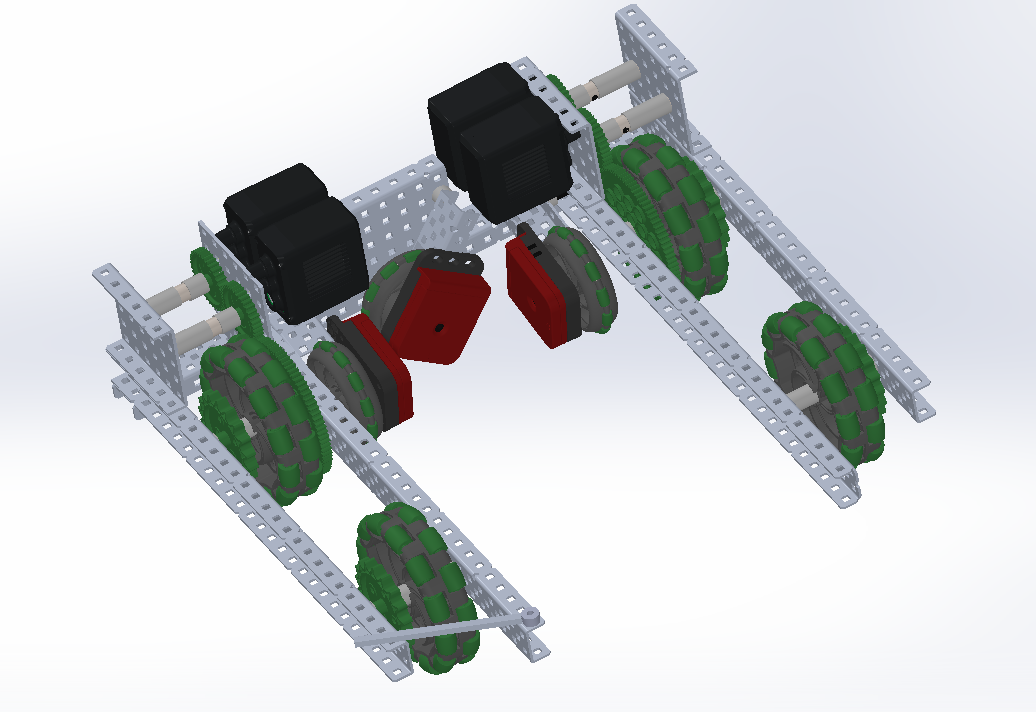
On the question on how to elevate the motor / gears, you can do something like this:
2 Likes
I meant the motors towards the back (like as far back as possible)