In the early years of VIQ there were some pretty amazing robots that were heavy on struts. They were light, very airy and pretty interesting.
Across the last few years, 2x and big plates have become more popular. For the last two years and this year, it’s been chunky robots.
I think the 1x parts have a place. If you connect them at 90 degrees along the length they are as strong if not stronger than a 2x beam. With the wide variety of corner connectors and the new beam parts, there isn’t a limit on what you can build.
We are also coming up on Thanksgiving and Christmas Holidays. So there is some build slack time on the horizon. And while the Kiwi teams are at a disadvantage because NZ is awesome in the Summer (I lived there for awhile) I’m going to push this across the next two months,
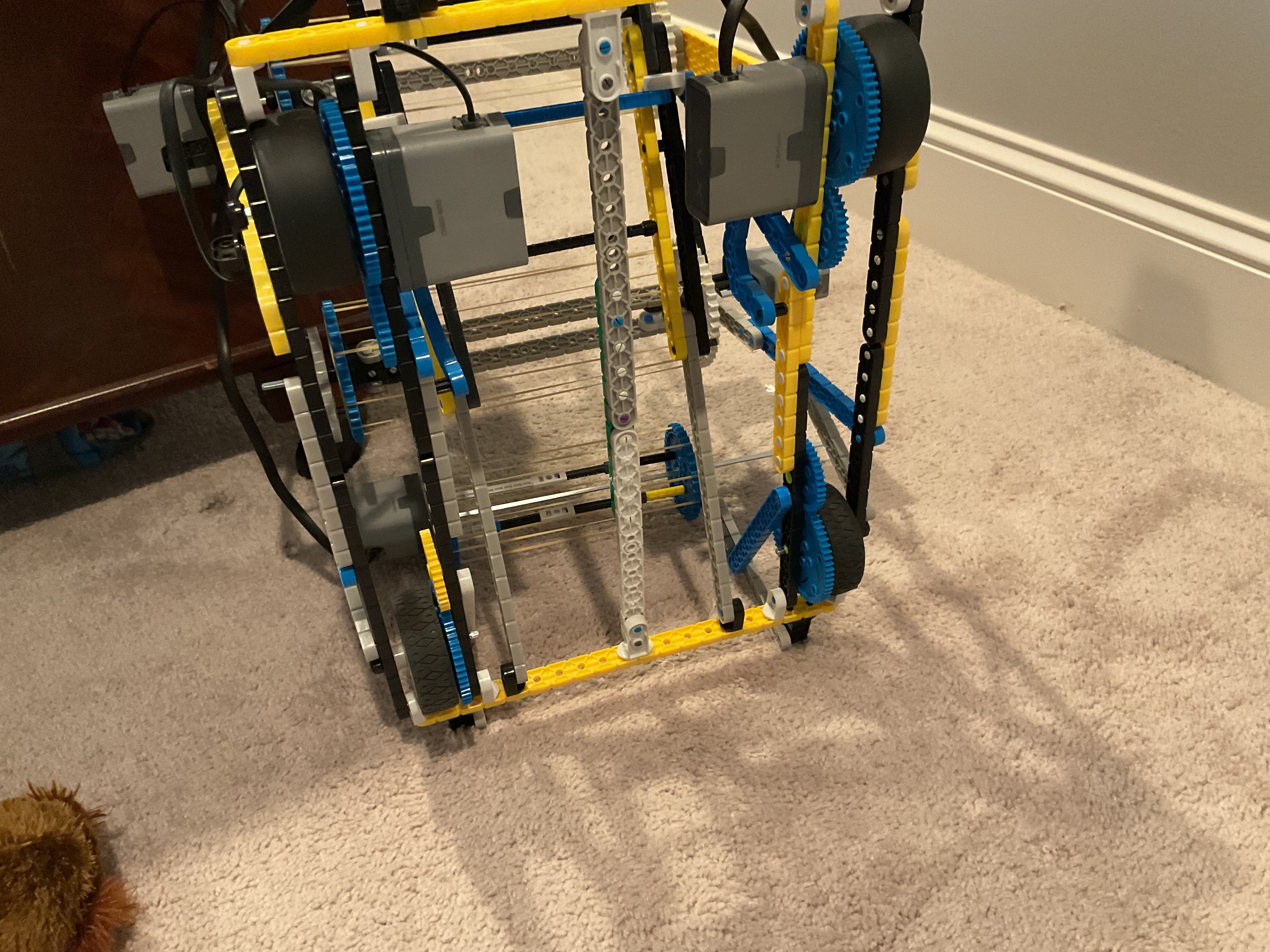
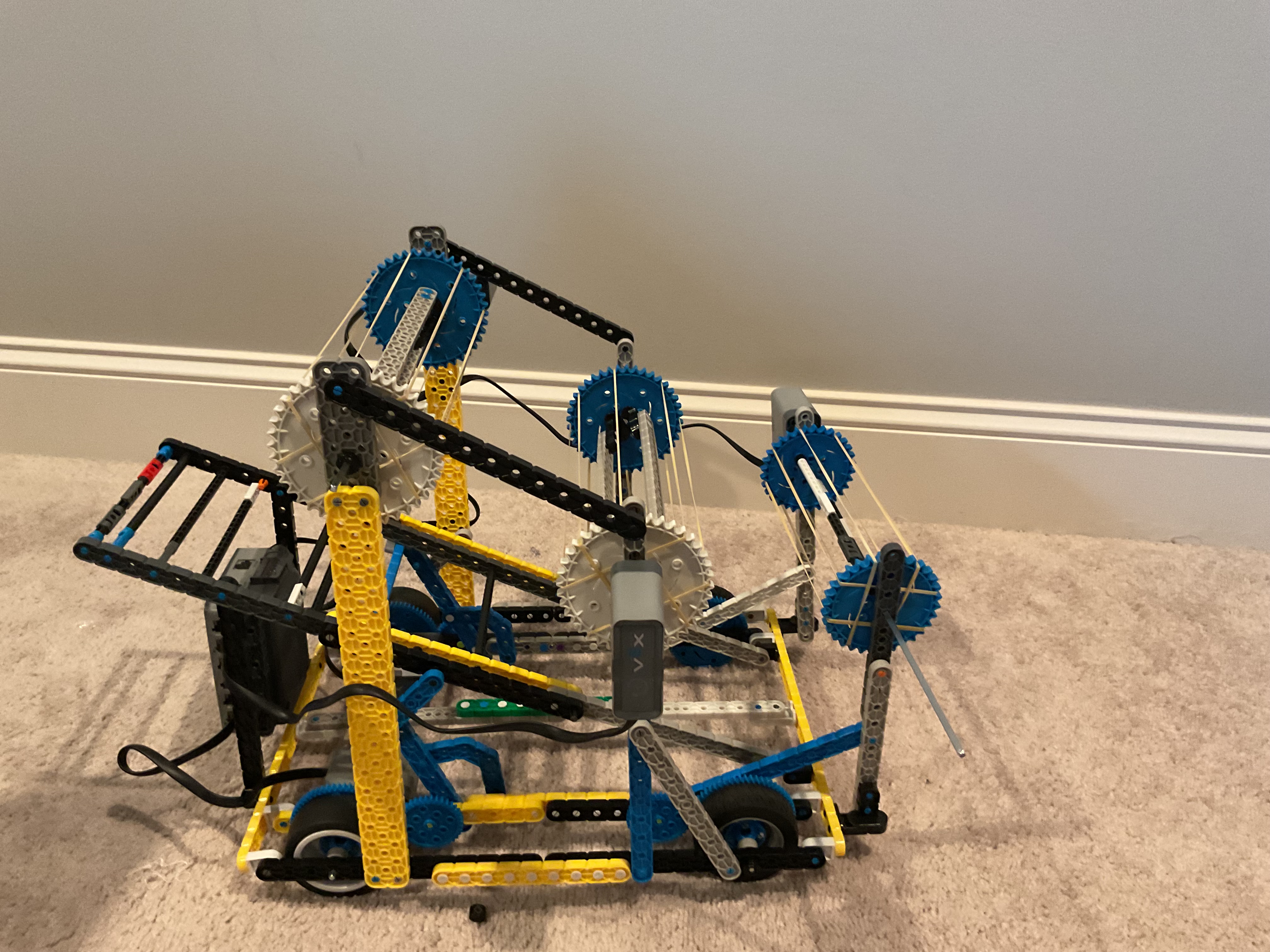
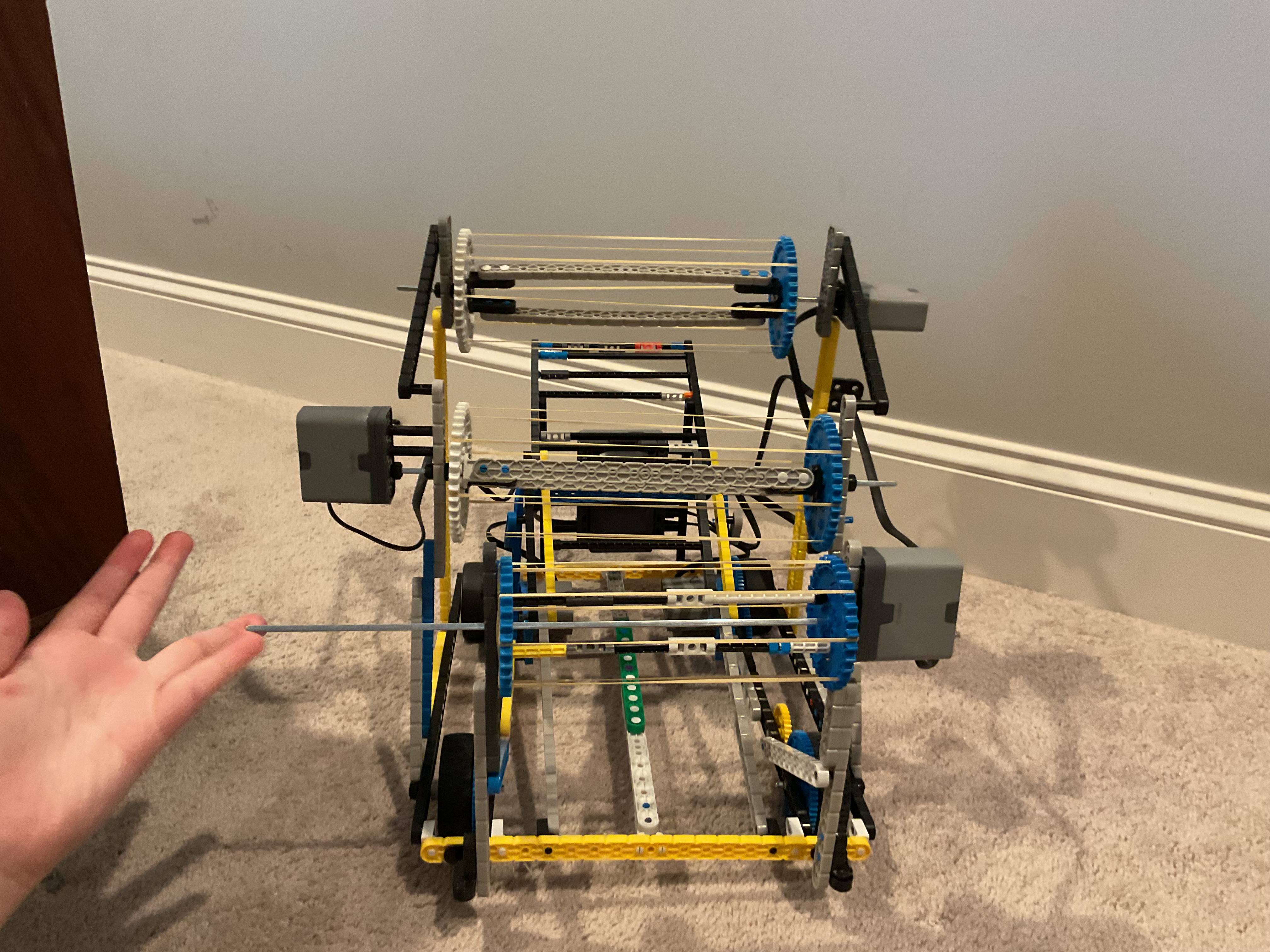
Contest: Best Rapid Relay Robot that is 80% 1x parts. I’m hoping for robots that can scoop up passed balls and shoot.
Criteria: 80% or more of the frame building components are 1x parts. So motors, gears and wheels don’t count. I want to see the 1x parts highlighted.
Looking for the most complete competitor, so functions matter.
Submissions: by 11:59 PM on January 1, 2025. I want 6 pictures, bottom, top, all 4 sides. I’d like to see them posted to this thread. But I understand that you may have found out that 1x parts are cool and are actually building your competition robot this way. In that case, email me at Foster dot Schucker at STEMRobotics dot org.
Prizes: First $100 in VEX parts before shipping, Second $75 before shipping and third $50 before shipping. In the event of a lack of entries, prizes will be rolled up. So if you are the only entry, it’s a $225 prize. Only first and second will split the $50 third place money.
There have been an epic number of parts in the last few field elements that are 1x. Kits are littered with 1x parts. Here is a chance to really show off your design and engineering skills, prove to us you are better than “Moar Plastic”
Feel free to ask questions.
As always, judges decisions are final even if they are petty, vindictive, capricious and arbitrary. Bribes are not condoned, but I am up for listening to your “offer”. This contest may be illegal in your town, state or providence, it’s up to you to figure this out. Contestants must be under 18 at the time of submission. If you are older, email your submission, I may or may not have additional prize money.
To be transparent, I’ve been very impressed with what people have been building in the last 4 years. I can’t speak for the VEXIQ management and Engineers, but I have been blown away by some of the recent constructions. I’m excited to see what you all can come up with given this extra but minor constraint.