Yes, titanium screws could get very expensive, and I am glad VRC is not competitive to the point when people would start buying them. Solid game strategy and planning for plenty of driving practice on a good enough hardware would always beat even the most loaded robot finished in the last minute.
@wdr_mentor, I am 100% in agreement with you that constrained environment could both: provide even playing field for teams with access to various levels of resources, and spark creativity to search for the new solutions within the limited set of available parts.
For each aspect of the game you need to hit a sweet spot (or range). If you constrain it too much - people will struggle to do basic tasks. And if you make it too easy - people will get lazy and throw unlimited resources onto the problem, instead of learning how it works and consider balanced alternatives.
I was somewhat disappointed when, with the introduction of V5, they let VEXU teams use unlimited number of motors. Just when the students are mature enough to understand more advanced concepts and will have access to precision CNC equipment, they removed one of the major incentives to learn deeper and try harder.
For example, during ITZ season, one of our students was putting a lot of effort into building fully automatic differential transmission. It could have been done if we had just a few more weeks before the Worlds…
Long story short - he graduated and, after it was announced that VEXU had no motor limits for V5, any plans to keep working on the transmission had evaporated in an instant. This is the latest prototype that was made (original post here):
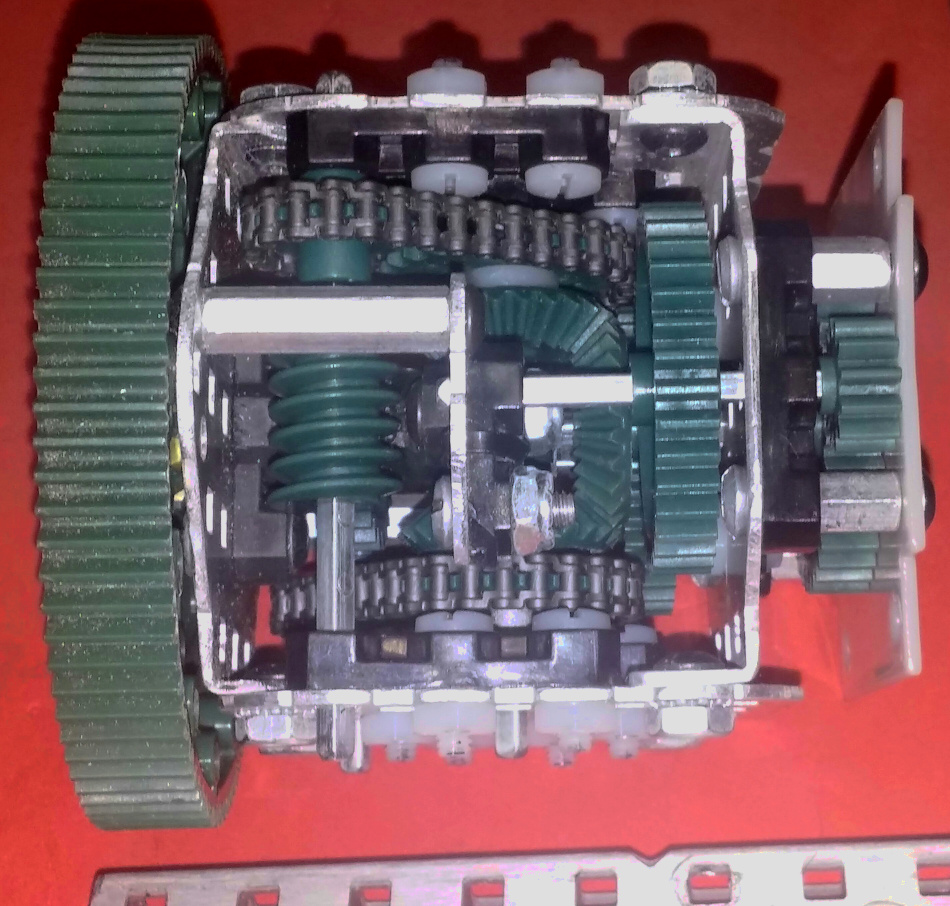
I could only imagine how much more it could have been improved with the access to VEXU legal materials, good CNC equipment, and a lot of motivation. Plus, all the educational benefits of trying to learn the theory behind designing custom gears, CNC machining techniques, etc…
So, I got pretty excited when I read this post:
I wish it had been better communicated to VEXU teams in the beginning of the last season. It adds a major incentive to think harder about game strategy and robot design, instead of just mindlessly adding extra motors regardless of their relative contribution to the final score.
Few days after that “revelation” was discussed on the unofficial VEX Discord server, I noticed increased traffic to several of my transmission prototype videos, and a few people had inquired about them over DM.
This was my main motivation to create this and its sibling thread: Differential transmission - power takeoff from the drivetrain motors