That is a very important observation that is applicable to any kind of non-locking dual-input differential based transmission.
This was discussed multiple times before.
Lots of math here: Automatic Transmission (non-shifting, multi-speed) - #9 by technik3k
Additional explanations here: Planetary CVT (Continuously Variable Transmission) Help! - #11 by technik3k
So what is the math that describes torques for the @Kyle1’s differential design?
Here is it’s simplified half-diagram:
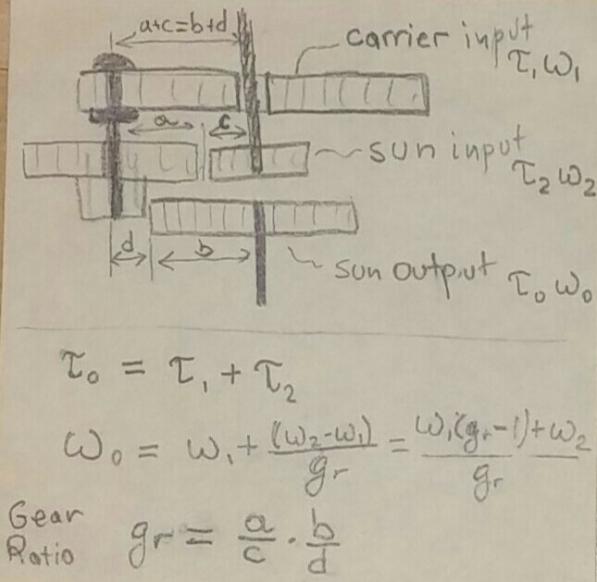
Input power from the first motor (τ1ω1) is applied to carrier gear and from the second motor (τ2ω2) to the input sun gear.
Output sun gear delivers output power (τ0ω0)
Gear sizes are, obviously, related to the number of teeth on the gear through π.
If you lock the output sun gear (ω0=0) you want both inputs to have matched torques to avoid one of the inputs from overpowering and backdriving another:

Assuming both input motors generate same power, this tells you how much inputs should be geared up or down relative to each other.
Another way to look at it would be construct a static force diagram around the connected planetary gears or the point where they contact output sun gear:

Here is the table for cases where you use (36T:12T)=(3:1) or (60T:12T)=(5:1) in the differential stages:
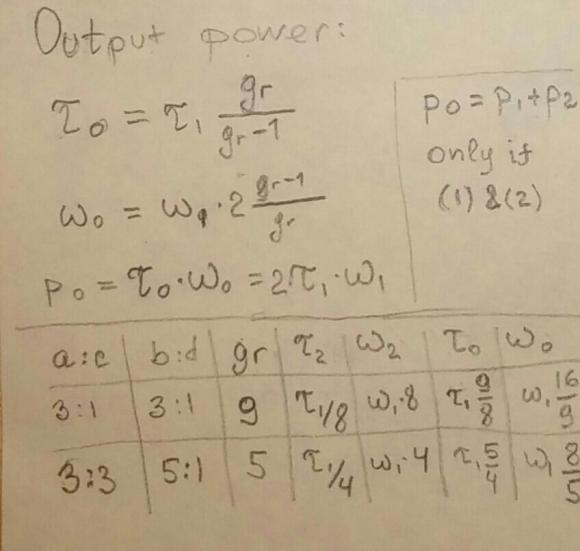
If the input torques are matched using formula (2), you could verify that the output power will indeed be equal to the power of two individual motors.
Otherwise, if the torques don’t match, you will not be able to utilize full power of one of the motors, because at full power it will be backdriving another motor.
In the (3:1,3:1) case you will need to gear up sun input x8 relative to the carrier gear and in (3:3,5:1) case you will need sun input to run at x4 of the carrier.
Also, please, note that this type of differential has input velocities and torques both adding up to the output with the positive coefficients, which means that you achieve maximum output velocity and maximum (added) torque at a time when both motors spin in the same direction.
This means that you cannot use it to build dual speed transmission, where you want to have either high speed or high torque mode, depending on the relative motor spin direction.
However, you can use this type of differential for continuous power sharing between two outputs, where relative direction of the input motors determines which output is spinning. But you have to be cautious about outputs that could be pushing back into the system when they are not active, for example, a lift arm.