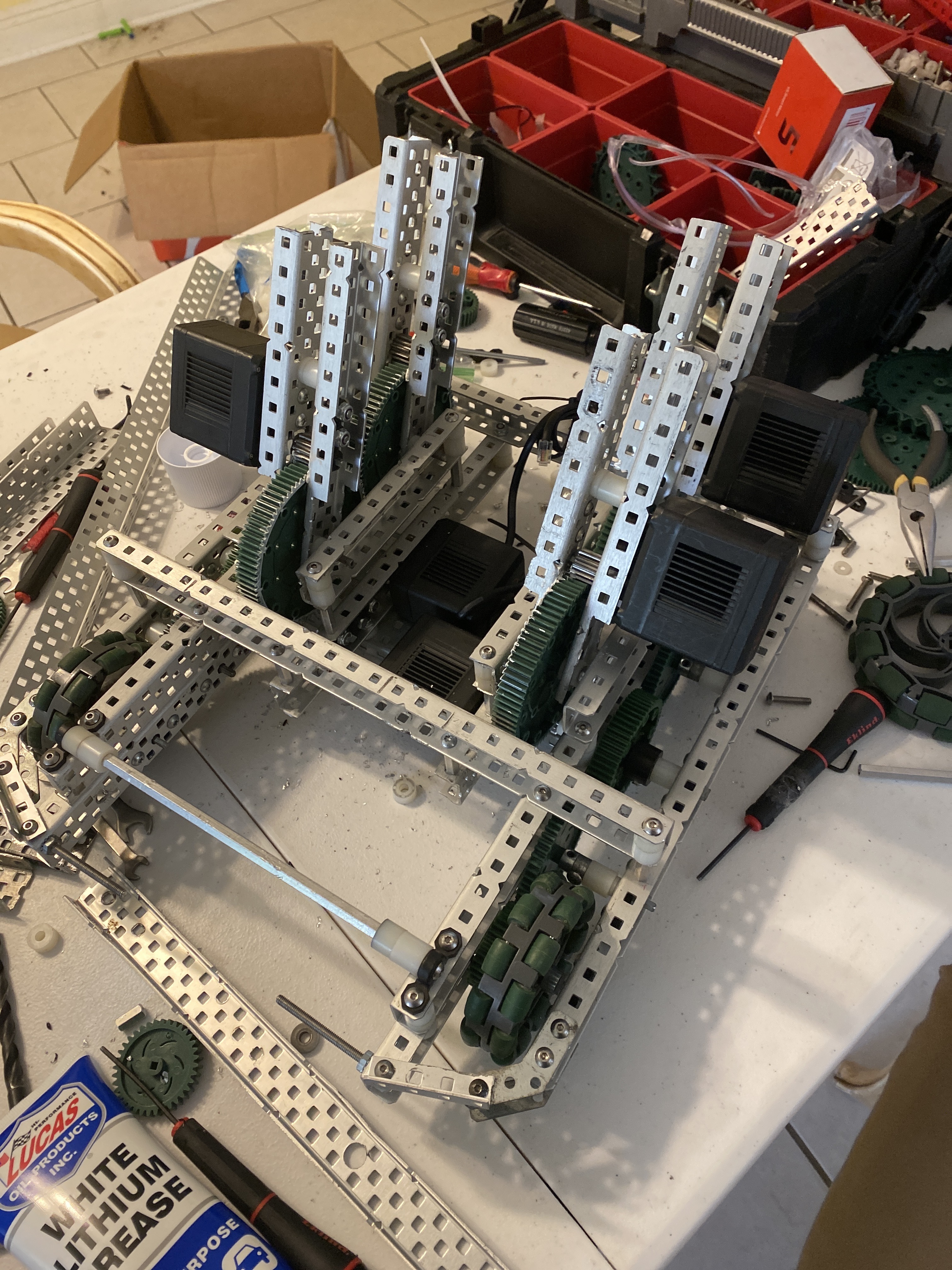
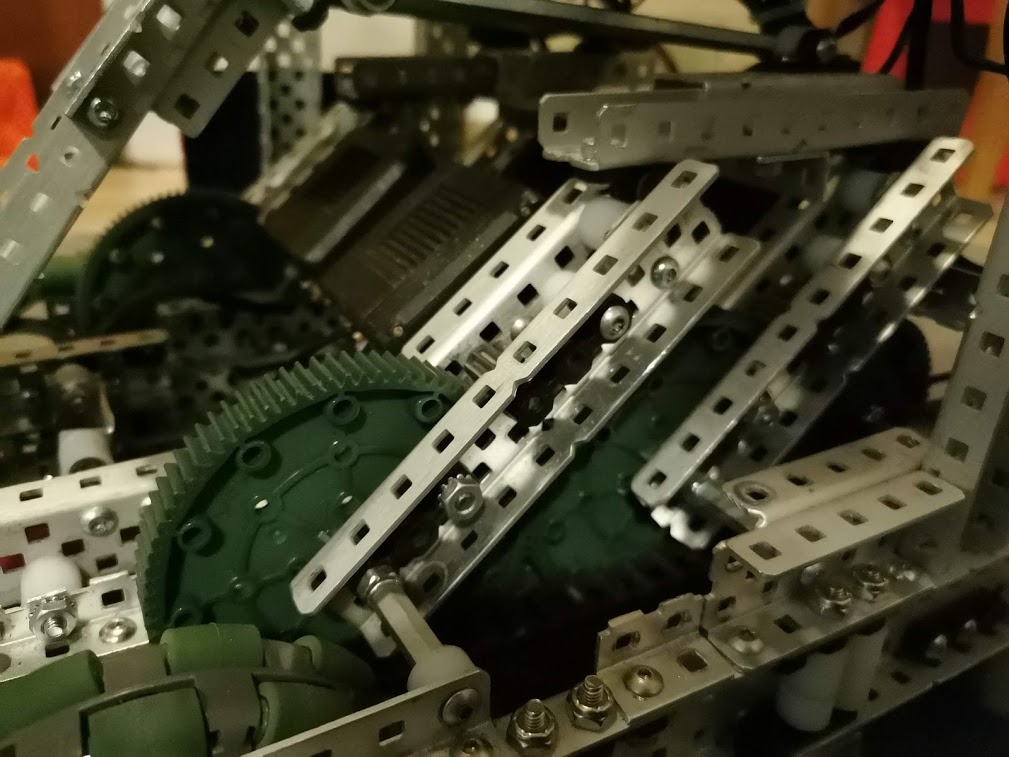
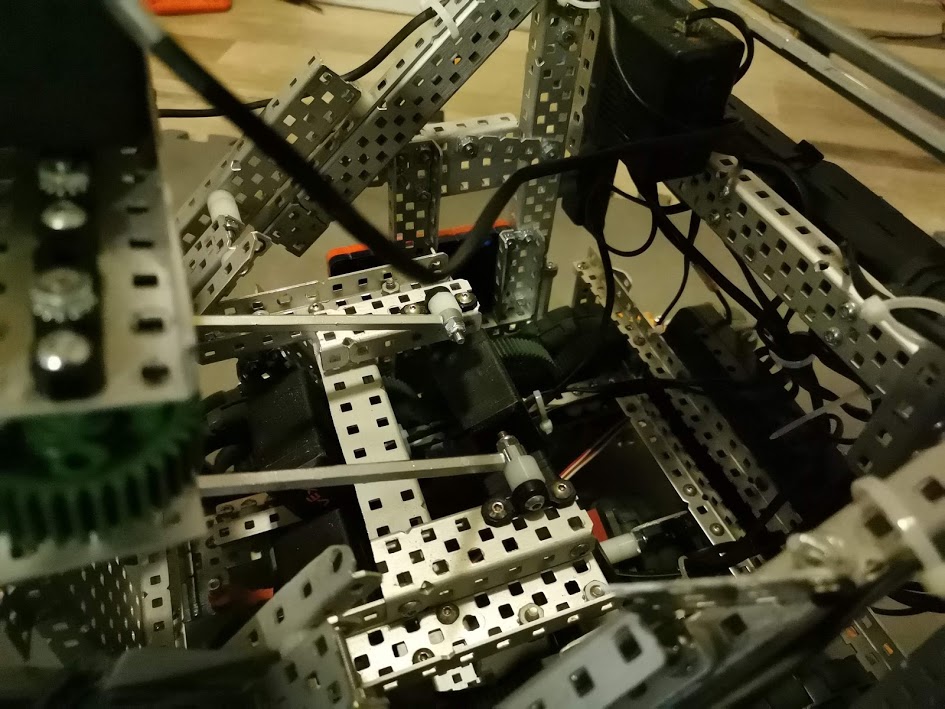
Recently, this post showcased a cadded model quite similar to the drive/angler transmission we have been devloping and improving upon since the summer, so adding on to the prior topic we’d thought we would explain how we implemented our transmission in practice, what we learned from it applied practically, and some tips for teams interested in building something similar in the future (full robot explanation videos are attached at the bottom of this post).
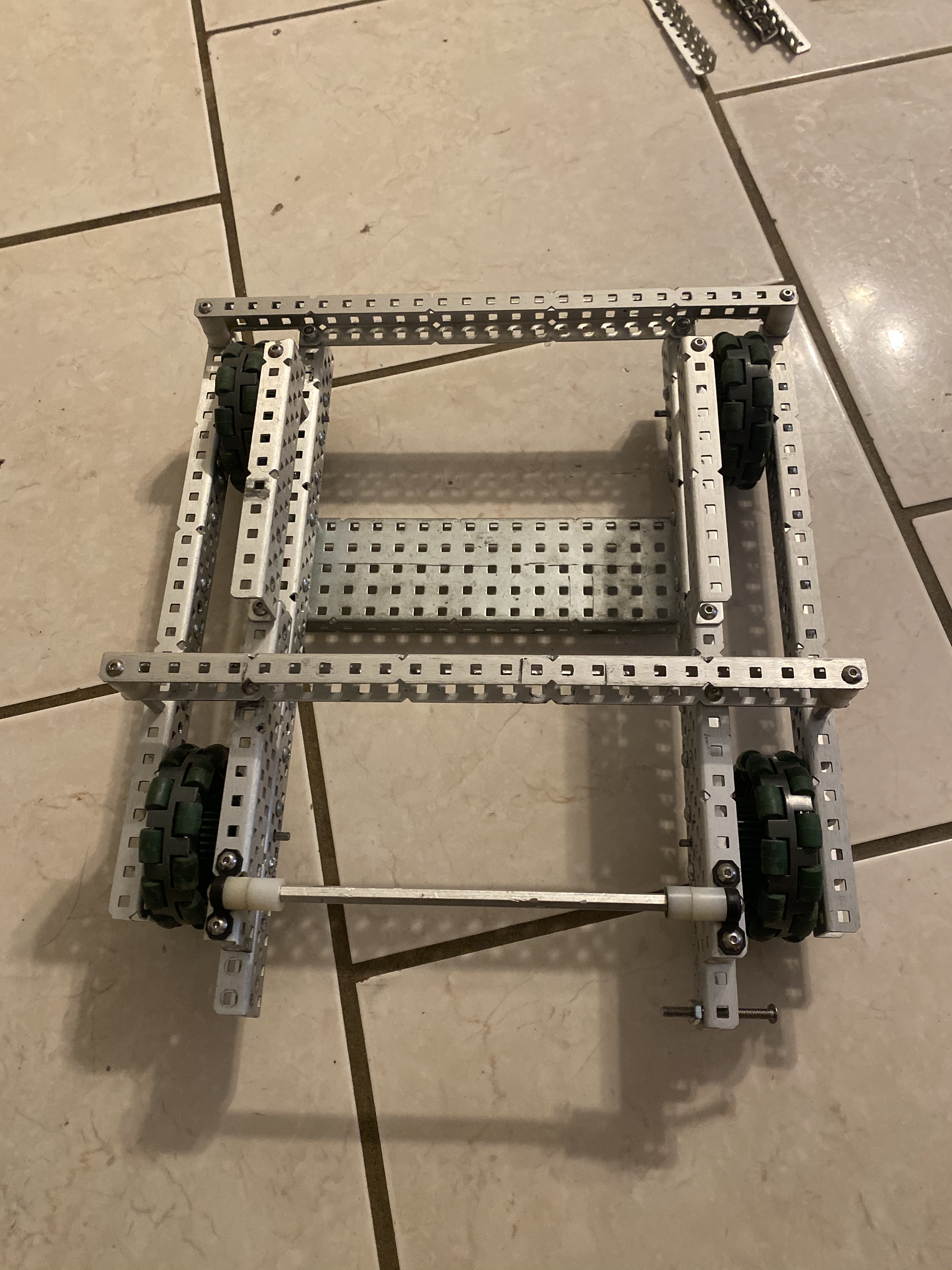
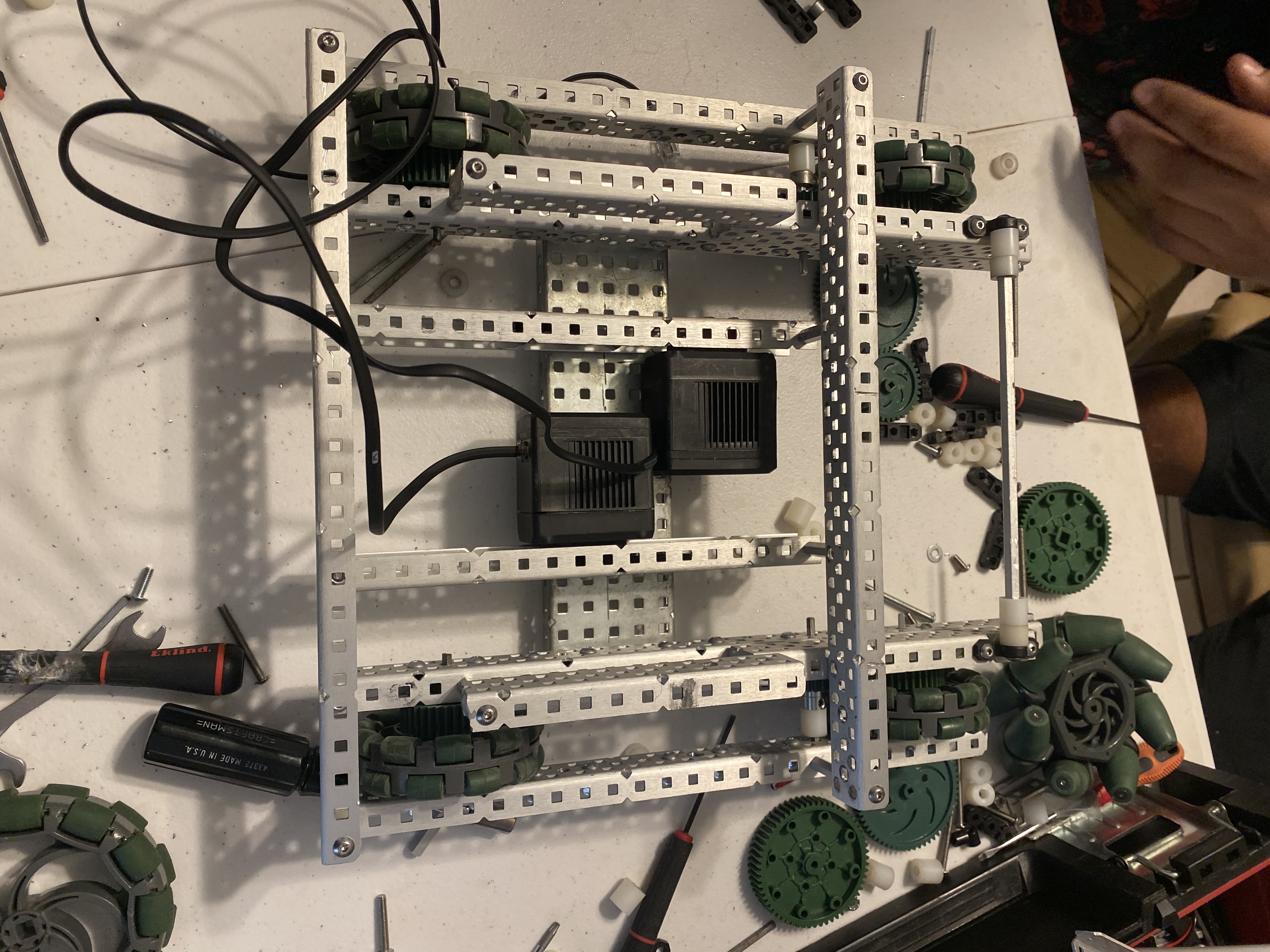
Overall, our transmission offered two main advantages: being able to give more angling torque (totals out to be 1:14 100rpm from the 4 green motors, which allowed us to angle 11 cubes quickly with ease), and being able to save 1 extra motor to use for other applications. Note that I estimate this would be able to angle up to 13 cubes easily.
There were 2 main non-negligible downsides that we noticed using this implementation of transmission. This first being friction losses, which made the robot have less pushing power while driving (comparable to x drive). However this was slightly mitigated by applying white lithium grease. We did not have any issues of motor overheating whatsoever the whole season, just make sure the gears free spin easily while building. Another downside was that we were not able to angle and drive at the same time which saves time during skills runs. Team 81K was able to develop code being able to power the drive and move the transmission simultaneously during their itz season, but under the heavy load of 11 cubes it isn’t able to supply enough torque due to losses as covered in this post.
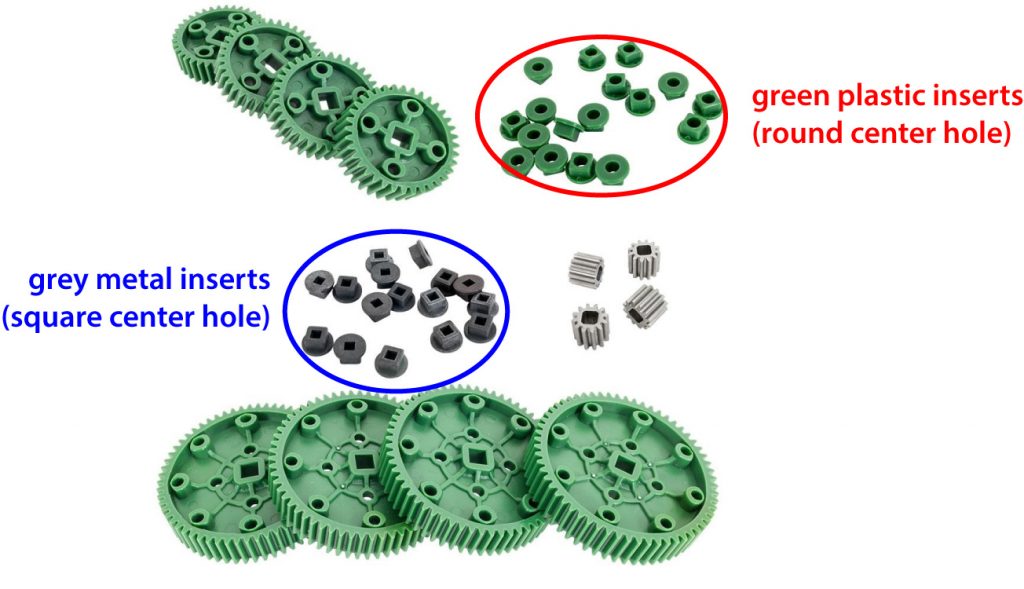
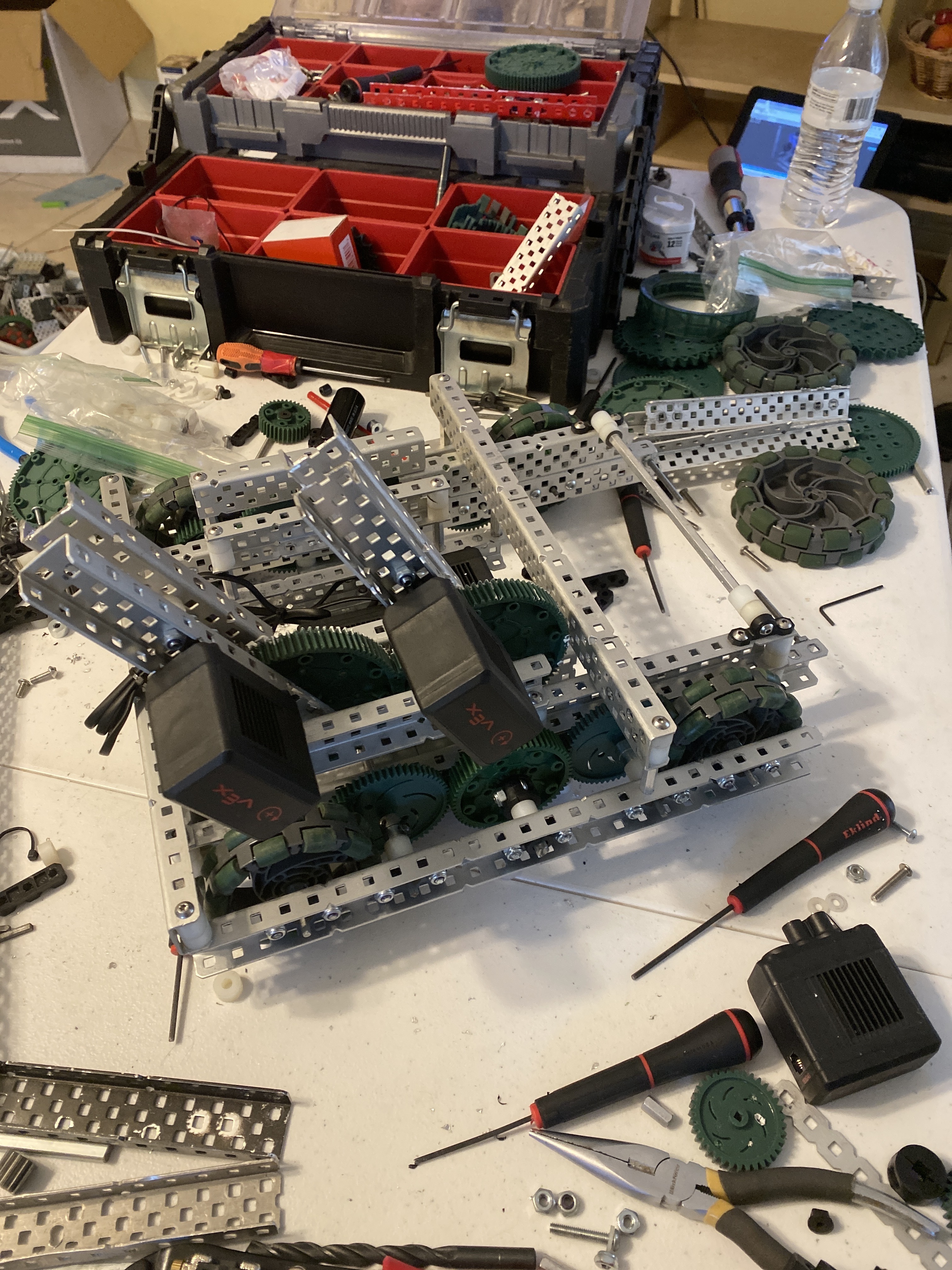
Some helpful look-outs to building this transmission effectively in practice is try not to cantilever your gears, as this caused us skipping issues. It is also preferred to minimize the number of gears that are being used to minimize losses of friction and to decrease slop on the wheels - essentially try not to make the drivetrain unnessecarily complex. The aluminum on the four bar part of the transmission should be full c-channels, as the half cuts on our first iteration eventually snapped due to metal fatigue accumulated over a few months.
In summary, I would recommend this implementation of a drive/angler transmission if you have a definite idea of where you are going to use the last motor. Something like an rd4b would be an interesting idea. It is possible to fit a cube lock on our transmission robot, but it would have been placed on the tray (similar to 7k), which would be slightly harder to implement.
Anyhow as promised, here are the full robot explanations, feel free to ask if you have any questions!
(there are more random drivebase tests and videos of the robot in action on my channel if you’re interested)
Final Explanation (current iteration)

Robot Reveal (current iteration)

Second Explanation

Initial Explanation