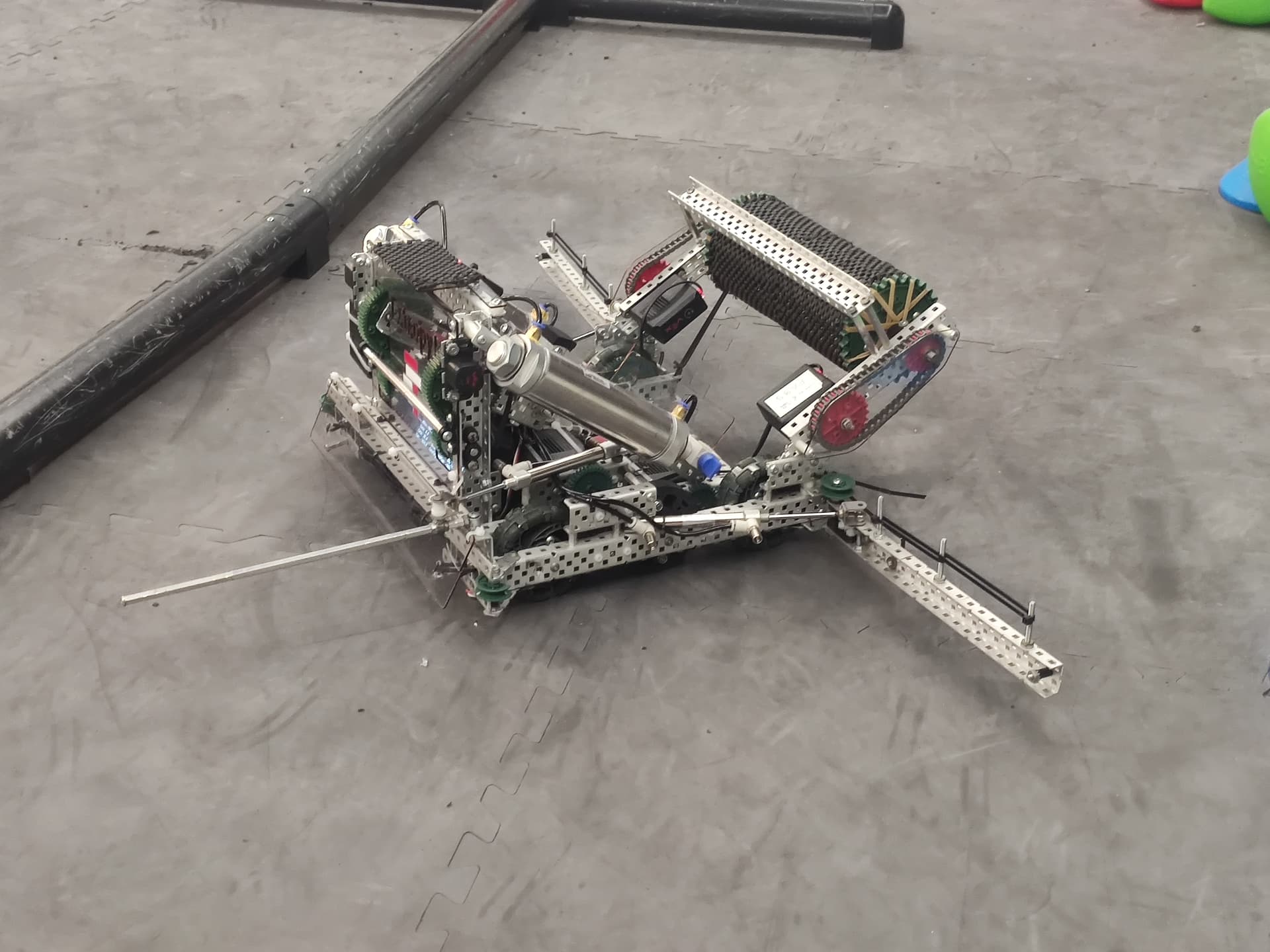
We are proud to show you the robot we designed. This robot won the championship of the high school Robot Skills Champion and Excellence Award in the just-concluded competition in Hangzhou, China.
We were inspired by the OWL Robotics, and based on the MO robot, we changed most of the structural design, thanks for their inspiration to our team.(VEX Over Under Robot Reveal: M-O)
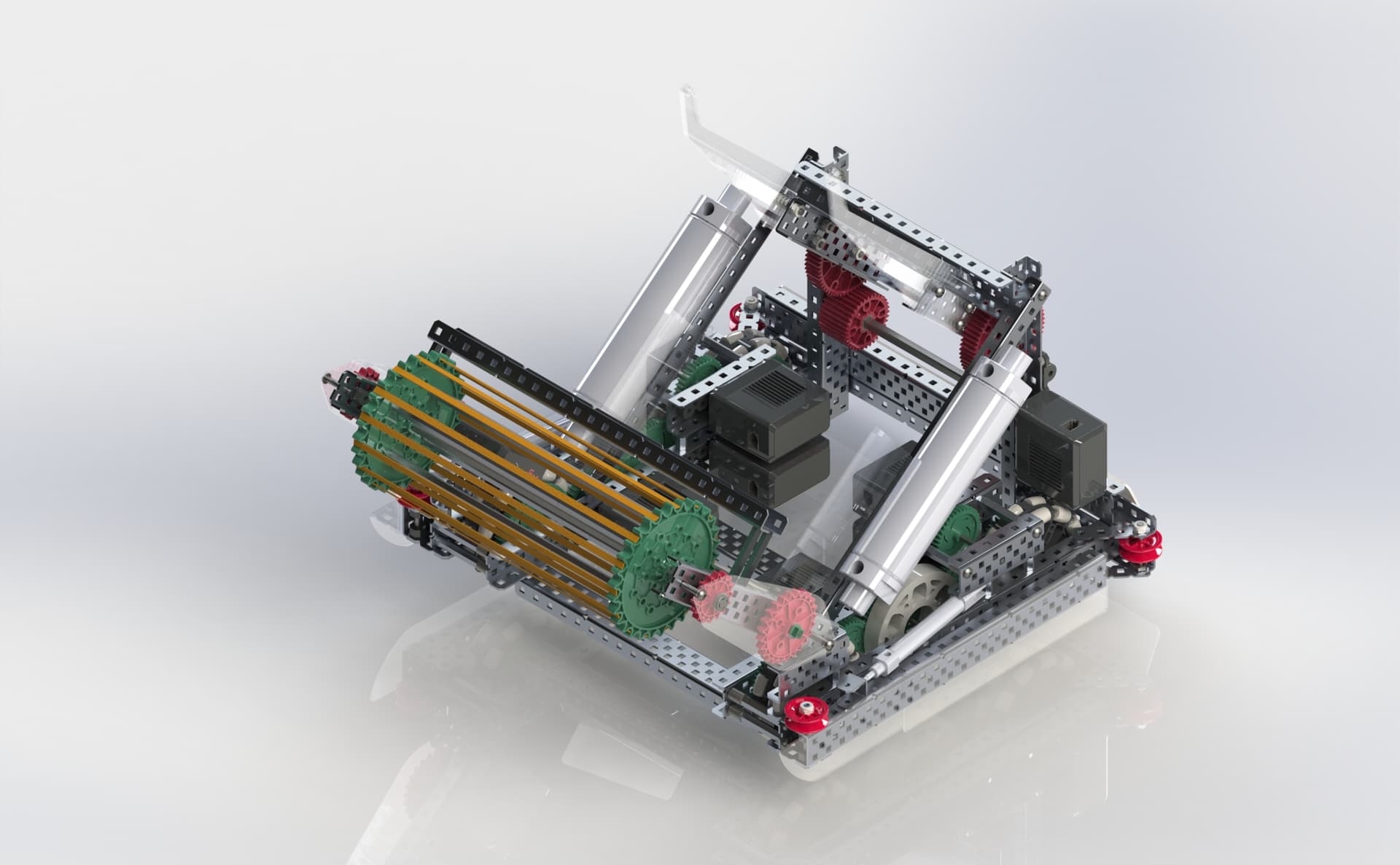
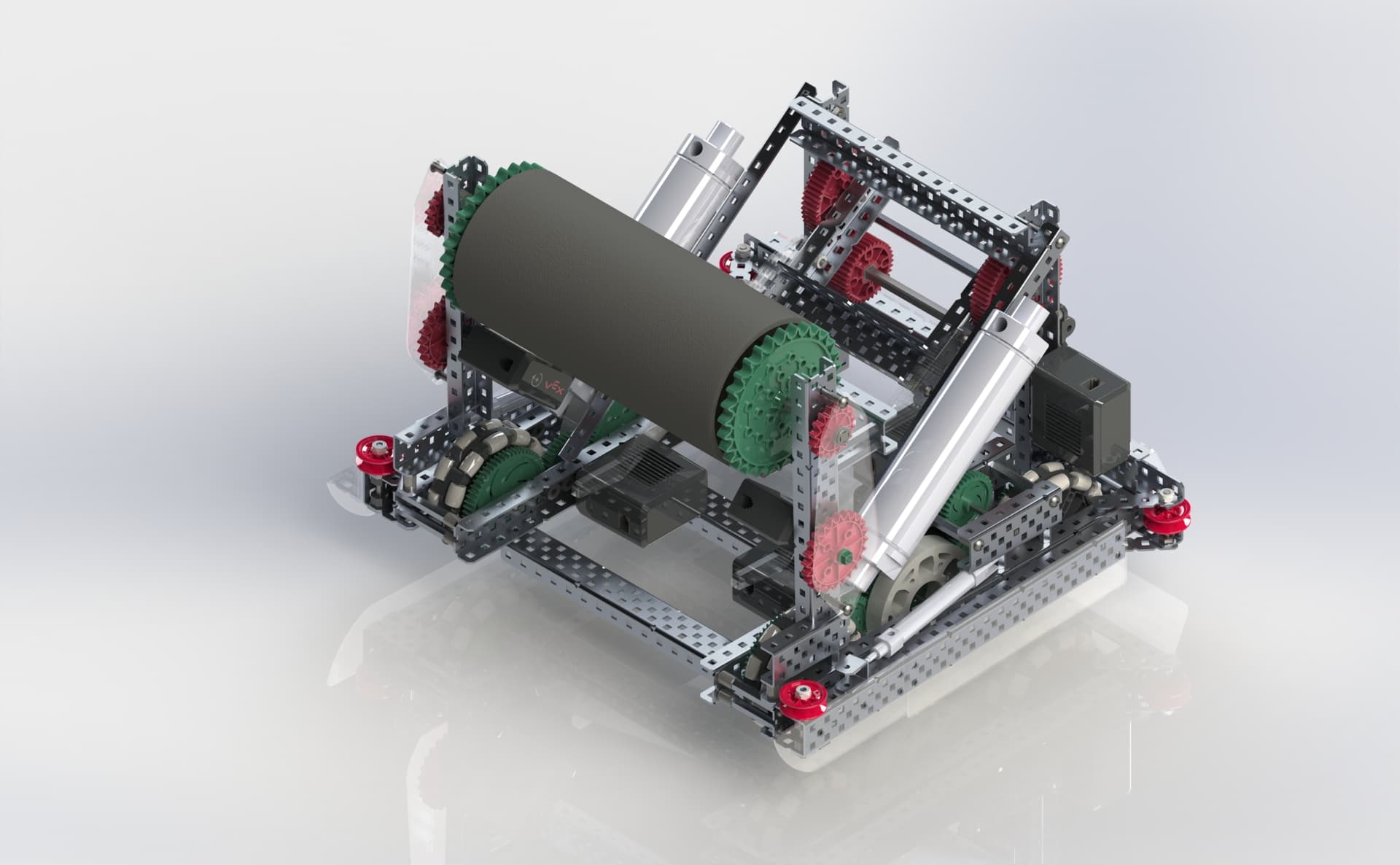
We use a lot of PC parts to make the robot, such as our cata and intake, to lighten the structure as much as possible and make the robot more delicate. Since it is mainly designed for skill challenges, we did not design climber for this robot. but the climber will added later.
It is worth mentioning that this robot was made by our team in Ri3d one week before the competition, and all optimizations and programs were completed within a week, so that it can work normally in the competition.
There are two 5.5w motor on the triball intake, instead of one 11w motor, I am curious as to why that decision was made? Could it be due to consideration of reliability perhaps?
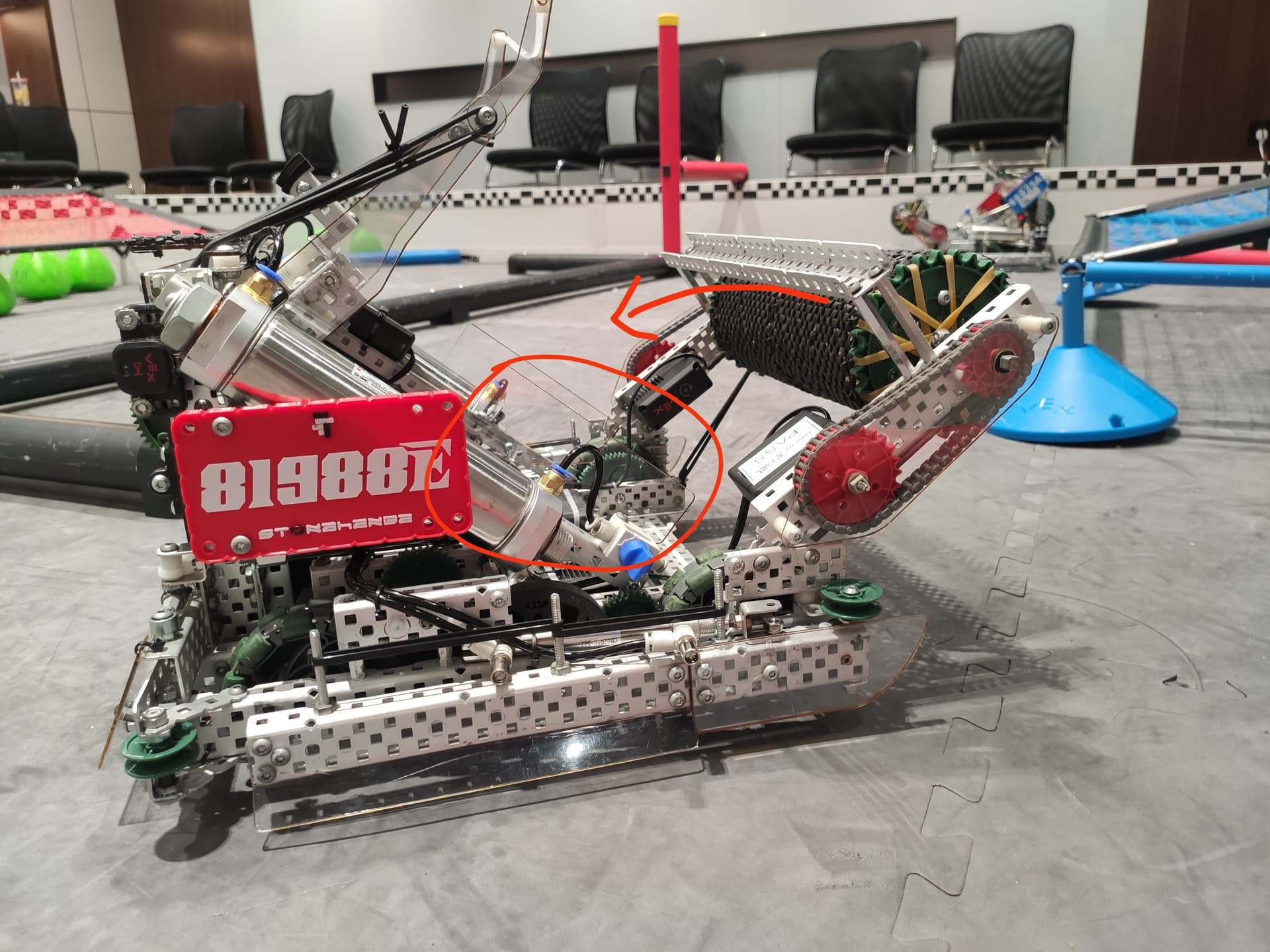
Sorry I wasn’t specific but I mean the standoff arm on the back of the bot that I assume is used to pull out the matchload during the autonomous period. Unless that arm is used for a different purpose?
Yes, it was made for the AWP, sorry for not showing the cylinder in the previous renders, in actual production it is powered by a cylinder that unfurls and hooks the Trilball out during the auto period.
Secondly, we use the chain to drive the intake. If we use 11w motor, we can only use one side of the chain, if it is damaged, our intake will not work properly, using both sides of the drive can solve this problem as much as possible.
Another small detail is that since the whole intake is lighter, using two 5.5w motors can make the center of gravity of the structure more balanced.
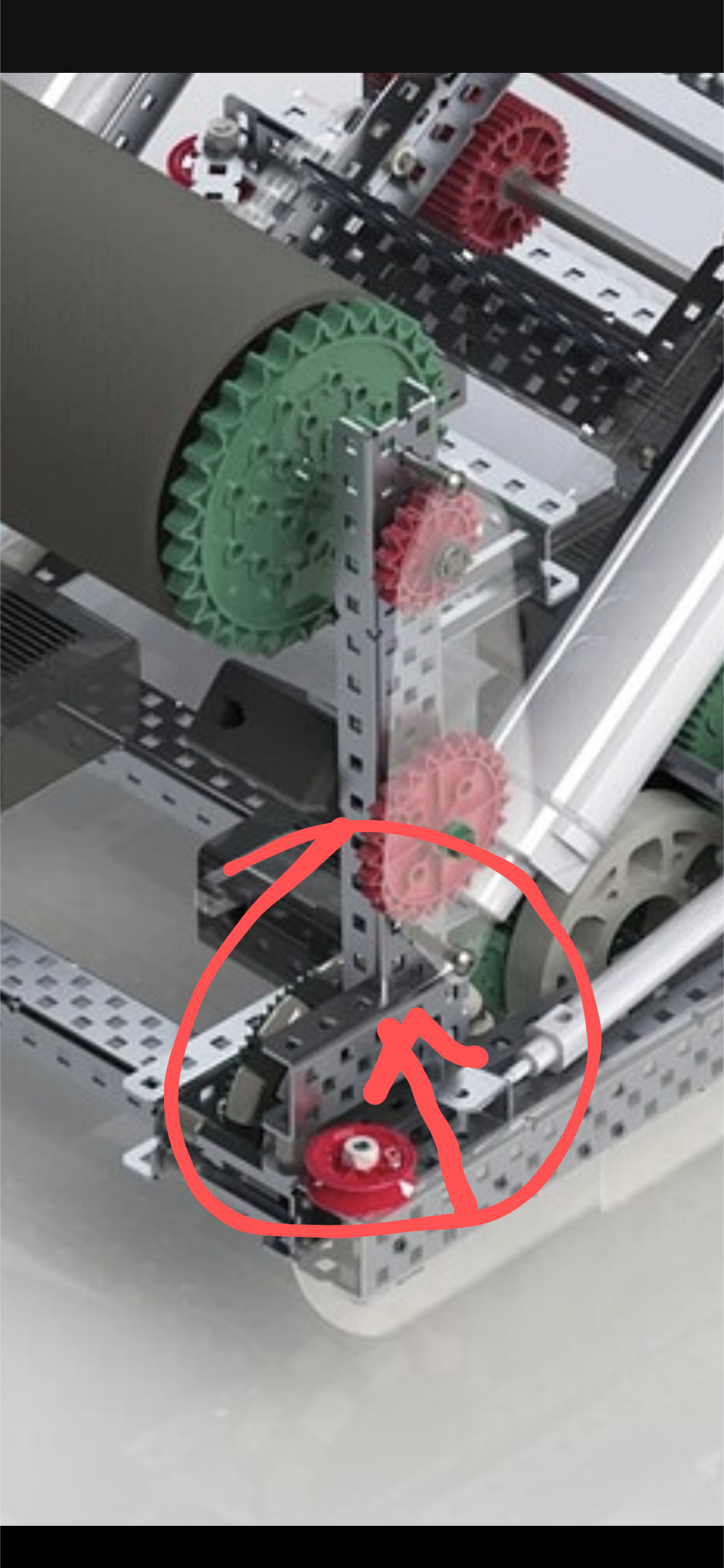
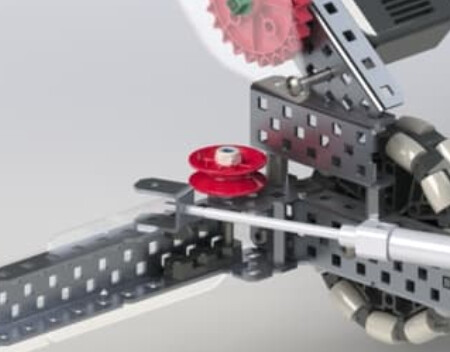
If what confuses you is the connection method, we first use a K-type nut to fix the shaft, and then install the intake on the shaft with Nylon Hexagon Nut so that it can rotate on the shaft. (The shaft is a screw)
If you are confused about the strength of the connection position, our team is also confused about this and try to solve this problem in the latest design of the robot, but at present, we do not have a perfect solution.
We use a lot of PC parts to make the robot, such as our cata and intake, to lighten the structure as much as possible and make the robot more delicate. Since it is mainly designed for skill challenges, we did not design climber for this robot. but the climber will added later.
Hi just wondering how you guys made the hs shaft so long I been tryna figure how to make my intake be larger but the shaft has always been to small so when I saw this design I thought how did they make the shaft so long. So just asking hgow you guys made it that long