Hey Guys! I’m planning on building an autonomous robot using V5. I’m wondering if I can add a GPS module to it.
I’ve found one at parallax: SIM33EAU GPS Module - Parallax
It says ready for use with 3.3V or 5 V microcontrollers. The V5 robot brain is 12.8 V.
I am unsure if it will work (I dont have experience with using 3rd party sensors), but I believe its good to note that a GPS is not precise enough to be used in something that requires precision. Basically, GPS is good for seeing what building the robot is in, but other than that it likely can’t even determine what room the robot is in (as what I heard from others about a GPS in VEX). But if your purpose is to find relative position of the robot for long distances (such as if you plan on making a VEX drone), then I’d say it may be worth buying?
The GPS Sensor you have linked uses serial communication. You can connect that to a smart port but you need to convert the smart port’s rs-485 to uart with a transceiver IC. Alternatively you can connect an arduino like device to the brain via usb or smart ports with a transceiver chip and then connect the arduino to the GPS sensor. The libraries are written in C so that would work better with an arduino than the V5. More detail can be found in this document
I will also add that all the people you would be asking for help in this matter are members of the VEX discord and you can probably get faster responses there.
I am working with BotWorld on this Project. Here is an update…
We managed to send data from Pi to Vex Brain over Serial Port (using USB cable).
On Raspberry Pi, we use PySerial module.
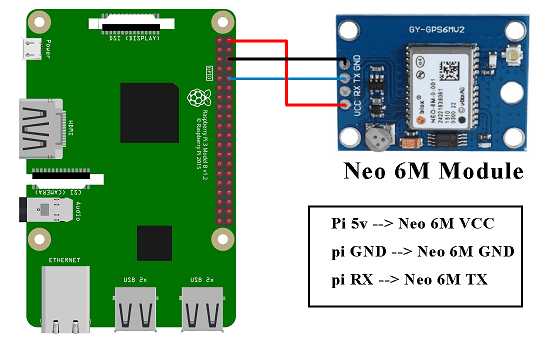
We read the GPS data from NEO-8MN, connected to Pi Serial Port. with wires .
We parse the GPS Data on Pi and then send the parsed coordinates to the VEX Brain…
The image below is not from our project but it is the same idea…
On Vex Brain. we use VEX Serial functions to read the Serial Data.
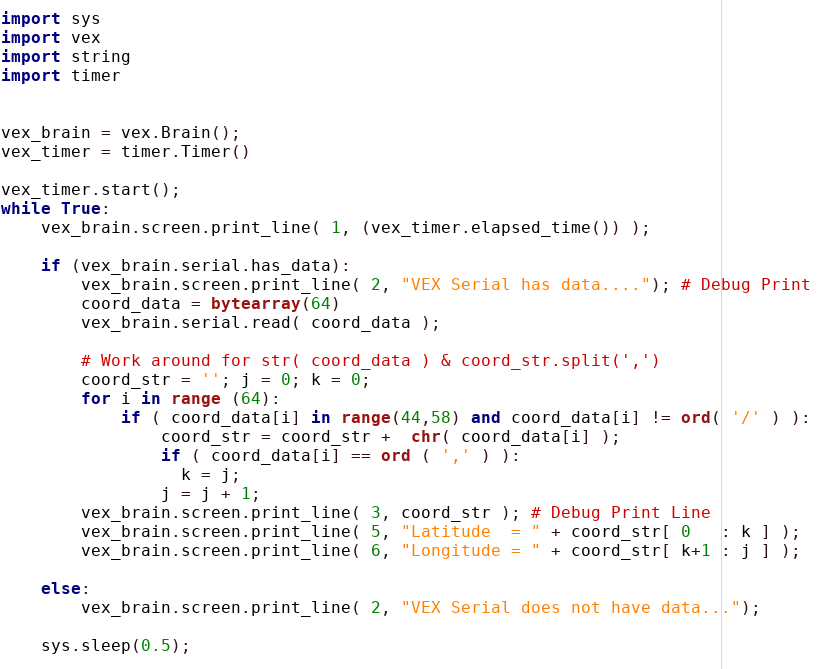
Following is a working code snippet that we use on Robot Mesh…
Here is a repo with sample code to send bytes. It includes sample code for arduino and PROS for V5. This example uses two smart ports (one for read and one for write) but you could do bidirectional on the same line but the code on both ends is more complex. If you have any question I am on the VEX Discord and it’s easier to reach me there.
Hi thanks for the information! I still have few questions however. How would I connect a raspi to a smart port? Also whats your discord username I could add you.
My discord username is majorjoel2#3434. To connect anything to the smart port you can use the doc I mentioned in this post to learn more about the RS-485 protocol as well as designing circuits using the transceiver ICs.