I heard about using a to power the tilter, saving a motor.
How would a transmission work without motors or pneumatics? Can someone share some up close photos of transmissions so I can understand what’s going on?
Thanks!
It would probably save a motor, however all the complicated mecanisms would probably add up to the weight of a motor.
Weight isn’t really an issue on my bot, the drivebase itself is actually really light, especially since it’s only 14 inches long (although it has protrusions that go to 16 inches).
I just want extra motors >:)
That would make sense, but it would also likely cost more.
What do you mean by that? Do you mean that the extra parts would cost money? Because I have a ton of excess gears and axles that I never got to use
The general downside with differential transmissions is that they waste a ton of force on friction (which is what I think @CarCar meant by ‘cost’) and from my experience with them, are typically too bulky to fit into any design not based around them. I made a whole new type of differential transmission over the summer this year to try to make them more useful but I then found there was nowhere on my bot to put it. I’ll likely share more on my experience with differential transmissions once I verify with my schools other teams that they aren’t going to try to use it.,
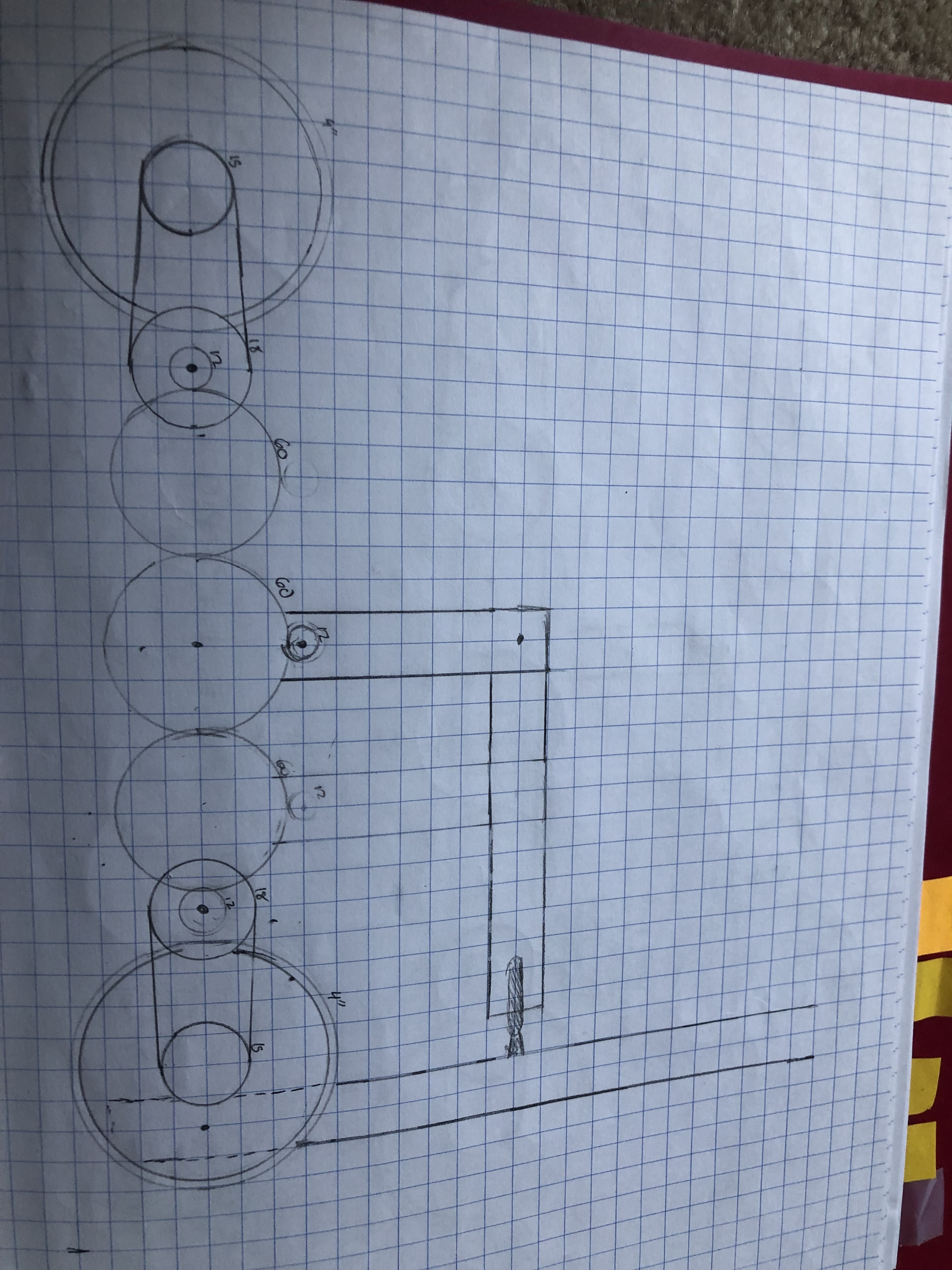
I’m assuming by “no motors” you mean no more motors than those which are on your drive train. This is a prototype I drew about two months ago to see how simple you can make a differential drive train that can power both the front and back wheels (it’s harder than you’d think) this design would work with both four or six motors, mounted on each twelve tooth gear, and is meant for a tray bot but could be adapted for another purpose. I don’t think it would have a great deal of friction if you managed not to mount the bars on the same axle as the gears. (The reason it is sketched is because since I am no longer part of a vex team I don’t have any access to parts so, oof)(My plan was to design a bot that could have a six motor 240 rpm base while still having an effective tray)
You could probably adapt it to fit your 14 inch bot if you offset the entire gearing upwards by an inch or three then moving the wheels together.
How exactly would that design switch between powering the tray and powering the drivetrain?
It works by the large (60 tooth) gears locking (you do this by having the motor that isn’t able to rotate around another gear not move at all) and the gear on the bar that does move being powered.
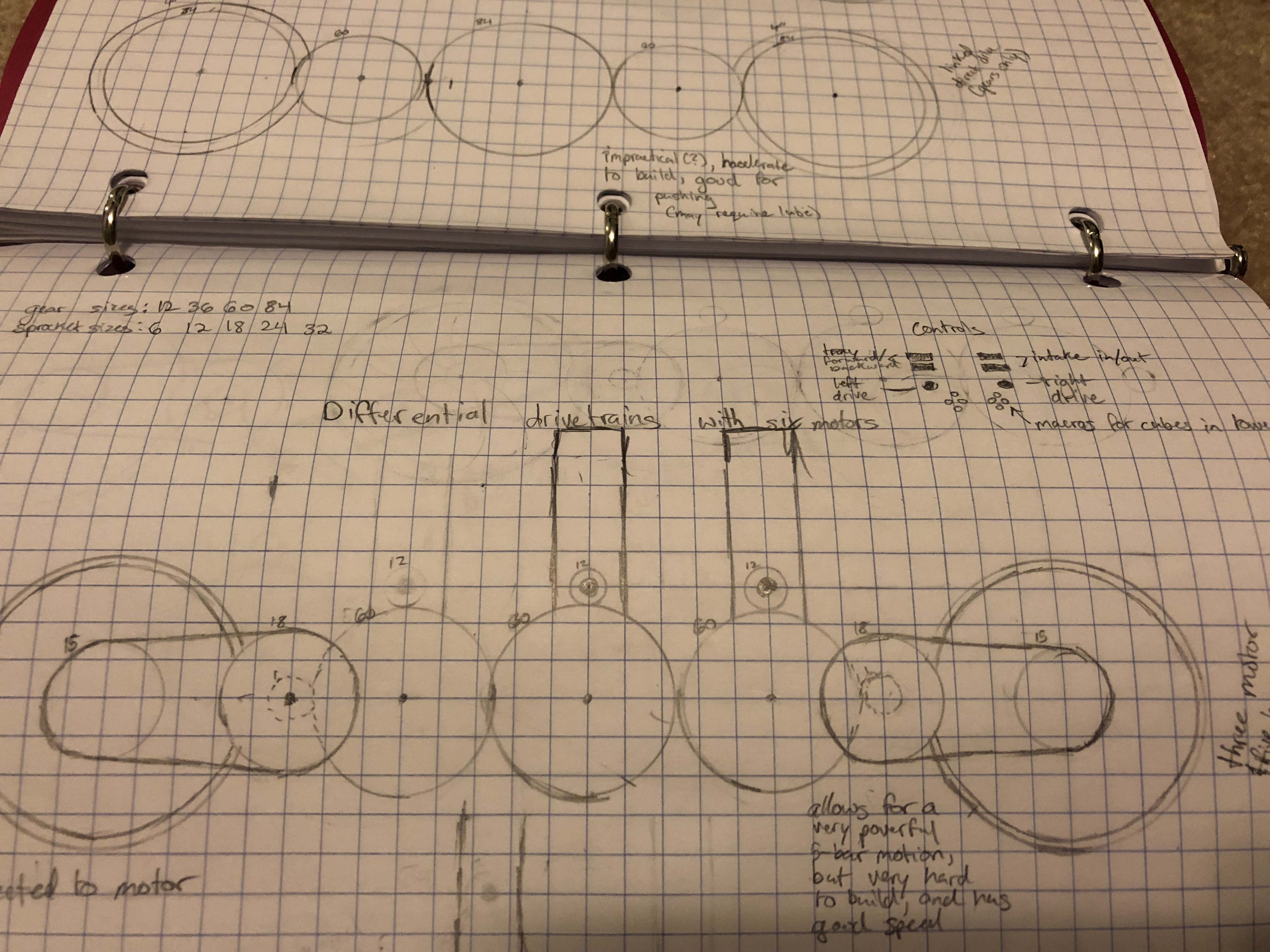
Or, you use two bars in this configuration where the motors spin the same direction to power the tilter
Summarized, in the first picture the motor on the bar spins and the other doesn’t to power the tilter (they spin in opposite directions to power the drive for both designs). In the second picture both motors spin in the same direction to tilt the tilter.
Feel free to use these designs
So the tilter tilts when only the two rear motors are going, and the drivetrain moves when all 4 motors move?
Yes, that is what is happening in the first one. The only downside is it only has the power of two motors.
The tilter tilts whenever the large gears are incapable of rotating. In the first picture, where you have one motor on a rotating bar and one on the chassis, the powered gear on the chassis prevents the large gear from rotating which lets the other gear make the bar rotate on it. In the second picture, it works by the gears rotational directions locking up the large gears and making both of the rotating bars rotates.
So for the first design, if you turned the motors on the chassis, then you could use all 4 motors to drive.
And on the second one, if you run all 4 you can power the drive, and running only the 2 in the back will tilt the tray.
(Sorry for all the questions I just really want to implement this)
Basically it is:
(One rotating bar)
One motor locked one rotating= tilter active
Back motors running forward, front motors running backward= drive
(Two bars)
All motors running forward= tilter
Back running forward, forward running backward= drive
Oh, I get it! Thanks for the explanation and your time! I’m probably going to rework my drivetrain now ![]()
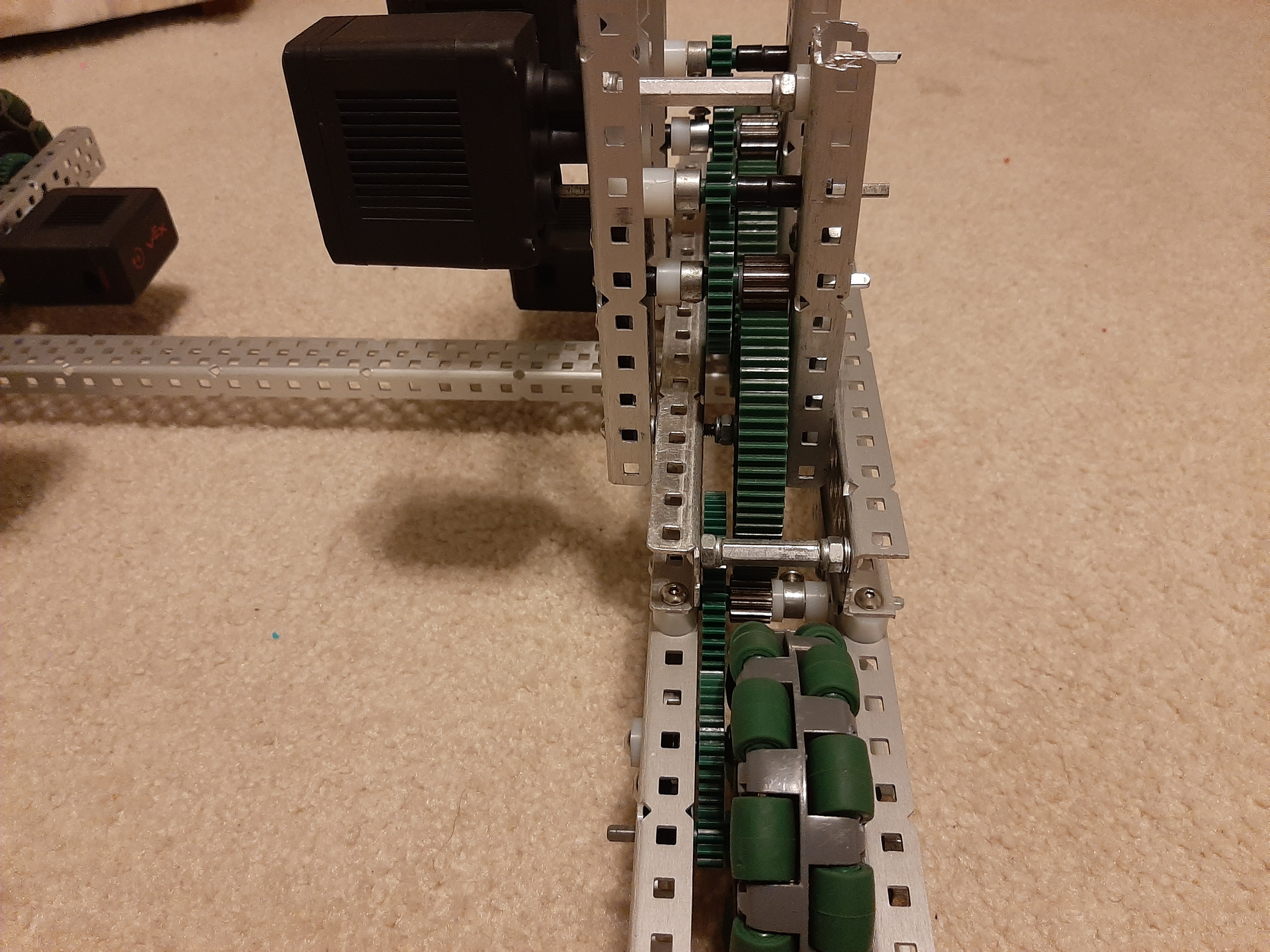
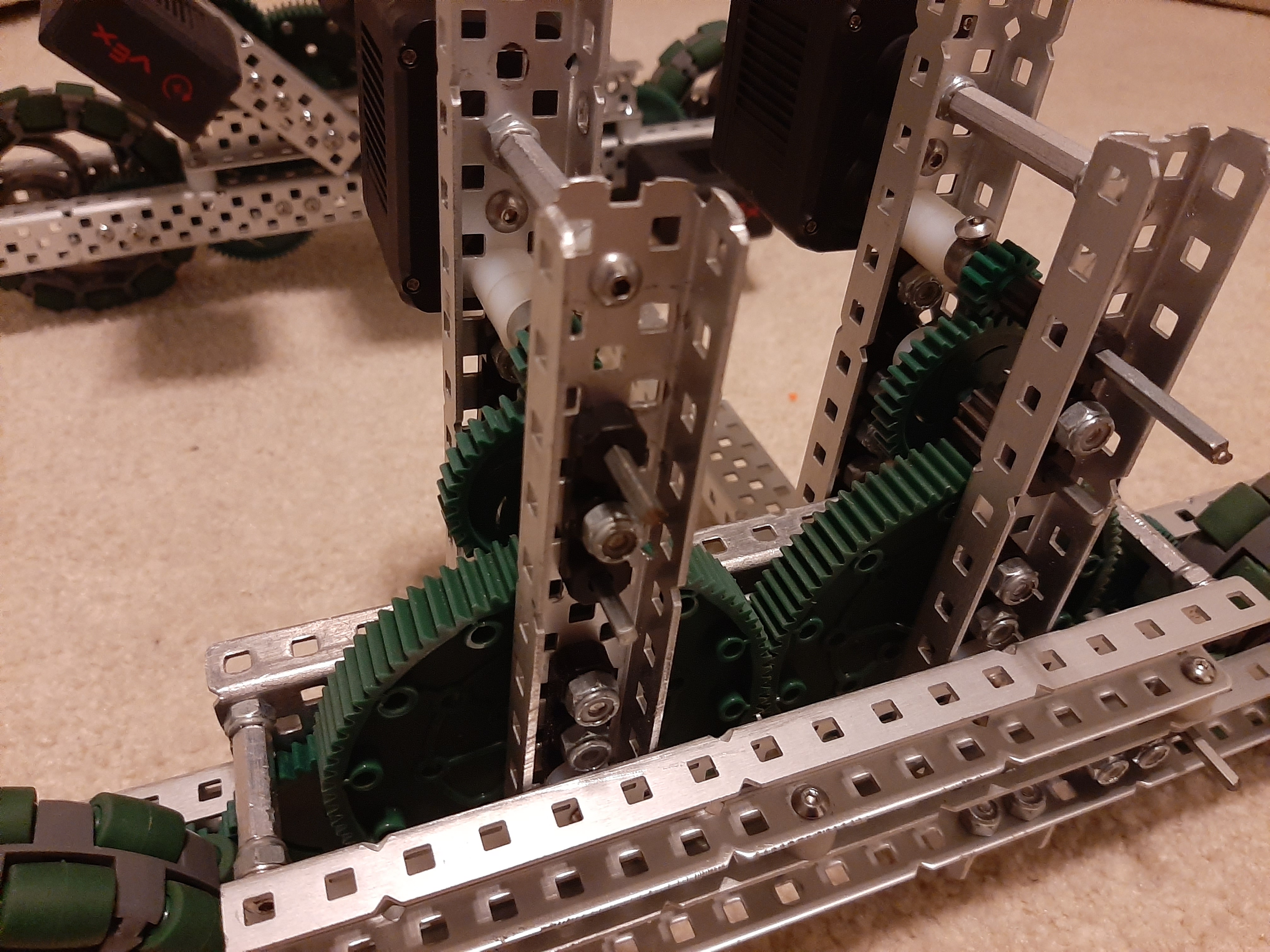
I am sad to say this, but a quick mockup shows that in it’s current form, the setup is unusable as it is too large for my chassis.
I may make modifications to the design mid season to fit it in, but I dont have time right now ![]()
If your chassis is too short, you can simply move the transmission higher and subsequently forward. The transmission can fit into 5 holes wide, so it shouldn’t be too wide to fit in your chassis.
Another way to use less motors, which is a little off topic is ratcheting systems. There were a bunch of really cool designs from last years.