So 2 weeks ago my school had our anual summer camp robotics tournament and i just wanted input on what could be done better
I have a few ideas but thought it be nice to get input
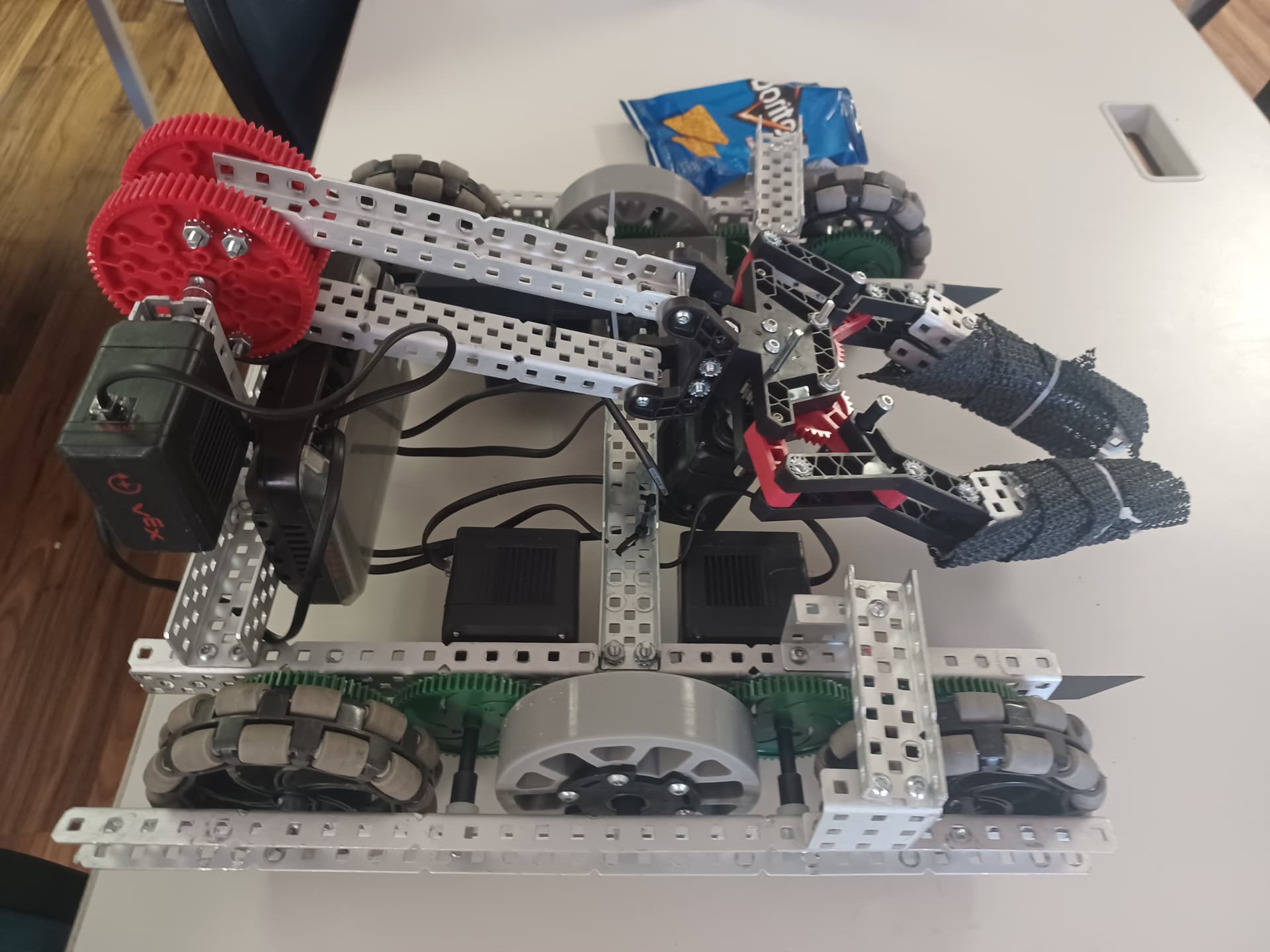
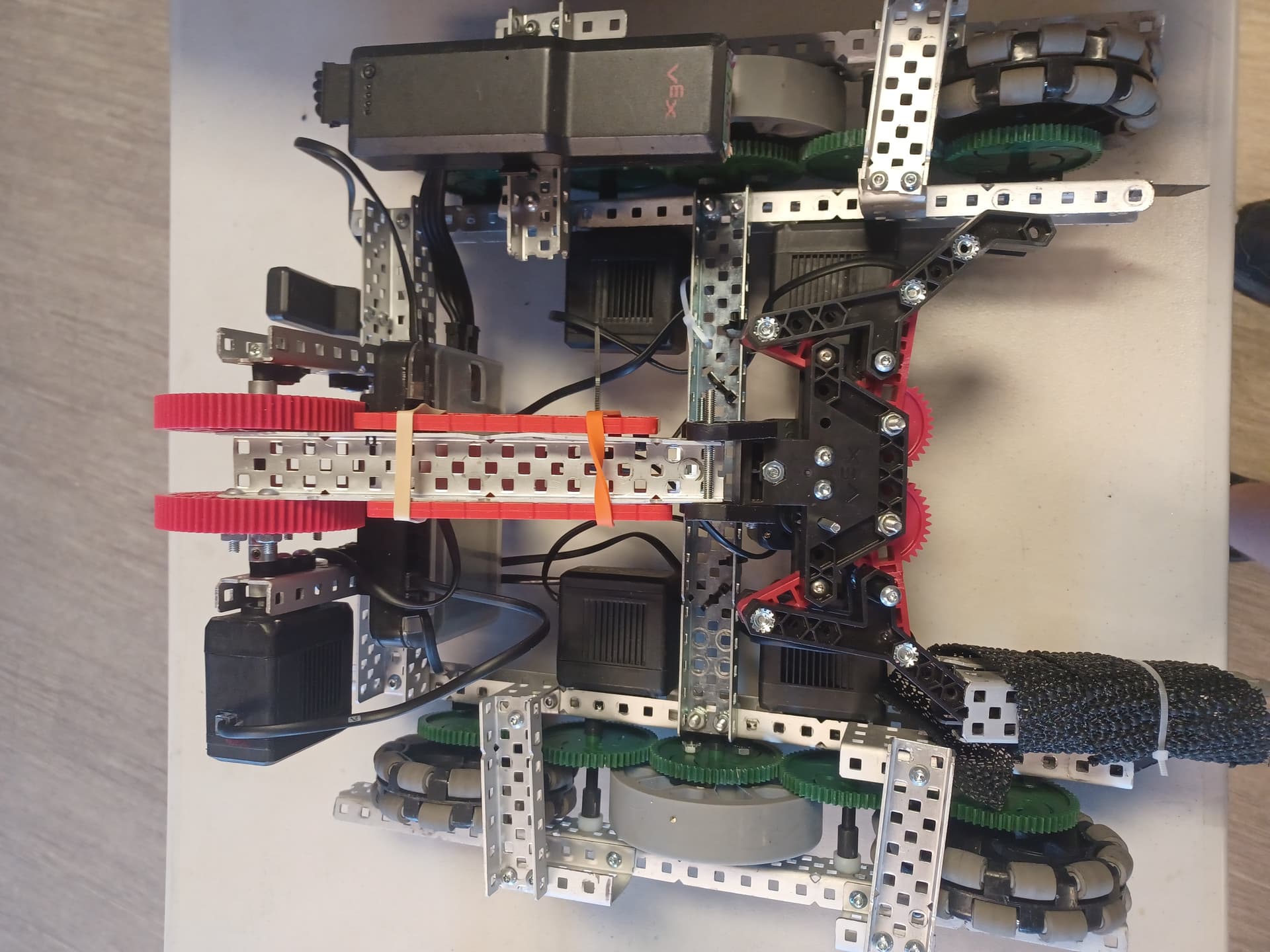
Specs:
4 motor 200rpm drive
6 wheels
100 rpm claw
100 rpm claw arm
Well done! This is a very good robot for just 4 days! If I could give some advice, I would say to:
Make your arm slower. 200rpm is very fast for an arm, I would recommend 100rpm. If you have red cartriges, you can use them, or use a 1:2 ratio on the green cartriges
Put more motors on your drivetrain. I am not sure about how many motors you have access to, but it is always good to put 6 motors on your drivetrain if you can.
Square your drivetrain better. This is a big one. The outer c-channels on your drivetrain are not mounted well enough, which can mean lots of friction on the drive which should be avoided. I would recommend having a long c-channel along the back of your bot and always use multiple anchor points (screws) on the c-channels that connect your drive channels. Sorry for saying channels so much😂.
Good luck in the rest of the season!
Thanks i was truly surprised at what my teammate and I did. I was the one that mainly built it and he mainly coded it. But we already hve both claw and the claw arm motors on red cartridges. And with the motors we are allowed to use eight but I have very little experience with ptos so i would rather use them for mechanisms but I will most definitely keep that in mind.
Then your arm and claw would be 100 rpm not 200.
Same here🙂. If your plan is a 1 motor claw and a 1 motor arm tho, I would think 6 motor drive is a no brainer. If you wanna see my RI4D, here it is. I was limited to 4 11watt motors until the last day of camp when I found two more. When our season starts in September, my plan is a 6 motor drive, 1 motor intake, and 1 motor cata.
Where are you getting the 200rpm from. I said in the post 100rpm claw and claw arm. Also I know forsure that we made it red cartridge.
Oh my bad, sorry for the confusion on my part. Just a question, is your claw able to pick up triballs into the air?
Totally fine. From the front it is difficult it acts more as a push but we can flip are claw 180 degrees to the back and picks them up perfectly fine.
Oh that’s cool it’s double sided. Can your robot hang or drive over the barrier?
It is able to drive over the barrier because at the front of the robot there are peices of polycarbonate that lift the front wheels so it can go over. As far as hanging still have to work on that.
I honestly want to make the arm pneumatic so that the robot can lift itself up.
Interesting. I didn’t even see the polycarb. If you have motors to spare, you could just use your arm to hang on the horizontal bar, then use that motor to engage a lock on on the arm to hold it in place. Just an idea.
Yeah one of my friends in the club found it online and it works great.
Also you mean like a ratchet system for the claw.
No, my idea is you lift your arm up, drive so your wheels are under the horizontal bar and your arm is above it, then when you lower your arm, it lifts the robot. Then, you have a motor that either locks onto the arm, or something ratchet-like, to hold the bot in place
Yeah I under stand that now I definetly have been thinking about that.
Thanks very much Micahy321 for all your input. Anybody else have ideas anything is welcomed.
I haven’t read through everything, but you must ensure your drivetrain has 2-3 cross braces.
If it isn’t, the robot will fall apart quickly.
Do you mean cross braces between the right and left side because we have 2 braces there.
Yeah, those are cross braces but if you can build ones that span the entire bot from left to right that would help make the bot more secure.
No, I mean a cross brace that spans the entire width of the robot, so it would connect all 4 drive train c channels.
okay yeah I definetly need to lengthen the cross braces. we have the seperate ones connecting the c channels together but nothing that spans the entirety of the robot
Take a look at these
Designing a Quality Drive
Designing Another Quality Drive