I remember in the previous program I could set the motors to hold mode during the disabled period to hang some points fixedly. But now I found that the same program does not set the hold during the disabled period, they always start at coast mode works.
Then I flipped through the forums, and it seems that hold mode can be achieved prior to VexOS 1.0.10, and after VexOS 1.0.11 the disable period is not settable, it seems to be forced to be set to coast mode.
What I want to ask is that now that I have updated the VexOS firmware, I don’t seem to have any way to downgrade. Then during the game, this seems to be extremely unfair. I am using the latest version of the firmware. way to hang the score on the balance bridge, while other teams with older firmware can achieve the hang. So how should I handle this? Seems extremely unfair from my point of view.
R21b states that this is illegal
b. Teams must use the latest official VEXos firmware updates, found at www.vexrobotics.com. Custom firmware modifications are not permitted
I would try bringing it up to the head referee at your event prior to or during inspection if you are concerned about teams not following the rule.
Are you sure this is accurate? Hold requires the motors to be able to drive
@jpearman would be able to tell you more.
This might also be for safety. If someone’s hand or something is stuck in the robot then disabling using the competition switch will let them get free (since coast is pretty easy to move, hold is not).
This is intended behavior. Vexos will automatically set all motors to coast brake mode when the field control is set to disabled.
One way to solve your issue is with rubber bands. If you attach them in a way that allows the rubber bands to pull your lift up, you can achieve a similar effect. Or you could increase the torque of your lift enough so that gravity isn’t strong enough to pull it down.
For a period of time some would argue this was a feature that was mistakingly present in the earlier days.
vexos 1.0.11 was released in June 2020, so setting to coast mode was a feature for all last season as well as this. The change was made in consultation with the GDC after we realized the previous behavior was inconsistent with how the cortex functioned, it’s unlikely to ever be changed back.
At worlds, all teams will need to be running the latest vexos (which is likely to be 1.1.1), older versions will be incompatible with the field control being used this year. For teams that have a broken USB connector on their brain, we will have other ways to update you, this will be part of the inspection process.
Will this method be made generally available? There are definitely some teams with broken usb ports on the brain that aren’t able to update their brains.
Not shooting the messenger here, but I have to say the general concept doesn’t make me happy. I spent a junior fortune on new motors, brains and controllers, NONE of which is backwards compatable with the Cortex. VEX threw a bone here with having 3 wire ports for buttons, but it’s a very small bone.
Can someone from the @VEX_GDC chime in here about why this was made. Can I ask that other things go back to the Cortex gold standard? I spent lots of money on motors smart enough to have localalize brakes, why can’t that be used?
This is two year old news. When the robot is disabled, we want the motors completely disabled. You can use brake, hold etc. at all other times.
And lots of teams didn’t have a season two years ago deep into Covid. If you want the motors to be completely disabled at match end, then passing it off as a Cortex backwards compatibility issue isn’t the way to go. I would be better to say "While the motors have the ability to have breaking set at all time, in the interest of safety motors will now be set to coast mode when disabled. "
And in a quick check of the VEXOS Change Log, this isn’t mentioned. Or there are a large number of significant changes made under the guise of “Minor Bug Fixes”. So not sure how the OP would have known about the changes. What may be a minor bug fix, in this case turns out to be a bigger issue for a team.
It was considered a minor bug, something I and many others missed, it should have been that way at initial release.
The community brought it to our attention.
Looks like 2020 me liked is as a feature but that @lacsap guy thought it wouldn’t be good for a hanging game. Sheesh, that guy ruins everything. Anyway, it would be helpful in the documentation to say what happens when the robot is disabled.
But, I still wouldn’t go back and say it’s for “legacy comparability” or “Cortex compatibility”, cause if we are going down that road then I want the “compatibility” of being able to get the debug info and the breakpoints that we had with the “legacy Cortex” and RobotC.
I think it is good for teams to deal with real world issues - what happens when you lose power? If it is consistent hanging, while driving and momentum bangs you into the opposing alliance platform and you just gave the opposing alliance 30+ points… real world issues for roboteers to solve. Also, the Game Manual is pretty clear that scoring does not happen until all objects come to rest.
It is consistent behavior … turn off motor and let things roll. Leave it to teams to learn about handbrakes when parking on a hill, or have wheels turned in right direction ![]()
Also a good life-lesson in a supplier making undocumented^H^H^H^H^H^H^H^H^H “minor” changes!
I remember in 2019 there was a bug that made the motors go full 127 while the field was disabled. Im not sure what caused it or if it still exists now, but it was very infuriating to be on the platform and at the end of the match during turning point and the robot has a mind of its own and drives off.
The brakes do make sense for the time where the cap bot would have wheels like 75% off the ramp yet strangely not falling during matches in turning point.
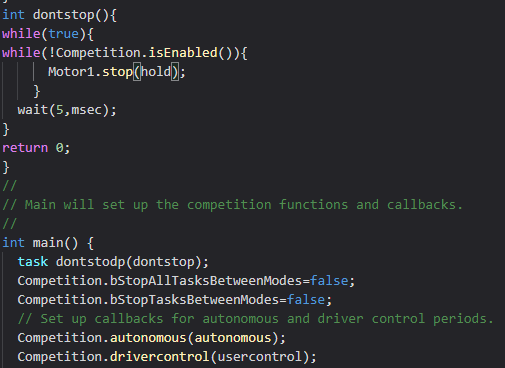
After reading the tread I got curious and started looking for a way to counter act this with out tampering with firmware, from my 45 minuets of texting I have found that the brain physically locks you from sending any motor commands when disabled. There may be a way to do this with pros or robomesh however.
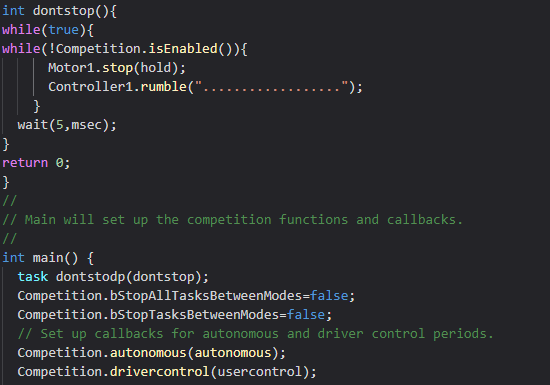
but i have found that you can sed some commands while the robot is disabled like making the controller rumble.
There is not, everything eventually runs through the same low level control code.
Don’t remember that one.
This seems like another case where I’m being honest and transparent about changes that were made getting me into trouble, the same thing happened a couple of weeks ago on another topic, but I’m sure this small change to the motor control has been explained more than once in the past.
We make many small changes to vexos, most are either bug fixes or improvements that you probably wouldn’t notice.