I was in the process of typing this on the now-locked Swerve Drive thread, and have since been asked to post it here.
Alright, I’ve been summoned to write some sort of end-all-be-all comment so you guys will stop arguing and trolling members of the forum.
First off - Stop being trolls. People are here asking genuine questions, and expect genuine answers. You all are in high school or college, and are mature enough to provide thoughtful, well-thought out responses. There is no point in creating drama out of nothing, especially here, on a robotics forum where people come to learn.
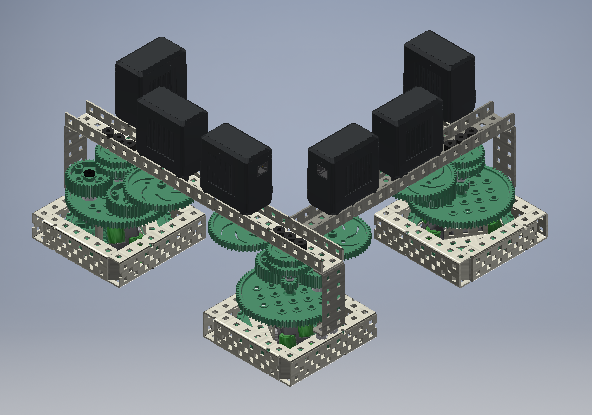
(Above: Not sure who made this, but it was taken from the now-locked Swerve Drive post)
Anyways.
Swerve Drives, while undoubtedly useful if built correctly, are typically considered a non-viable drive train type due to their excessive motor requirement and high complexity. Your attached image is obviously a good example of a swerve drive and the cost-prohibitive use of 8 393 Motors. Keep in mind that when building, you are allowed to use a maximum of 12 393 motors OR 8 V5 motors. Choosing to use 8 393 motors solely on your drive train restricts you to using 4 motors for every other mechanism (without the use of a transmission, which, again, adds unnecessary complexity); whereas building an 8-motor V5 swerve drive does not leave you any leftover motors to power anything else.
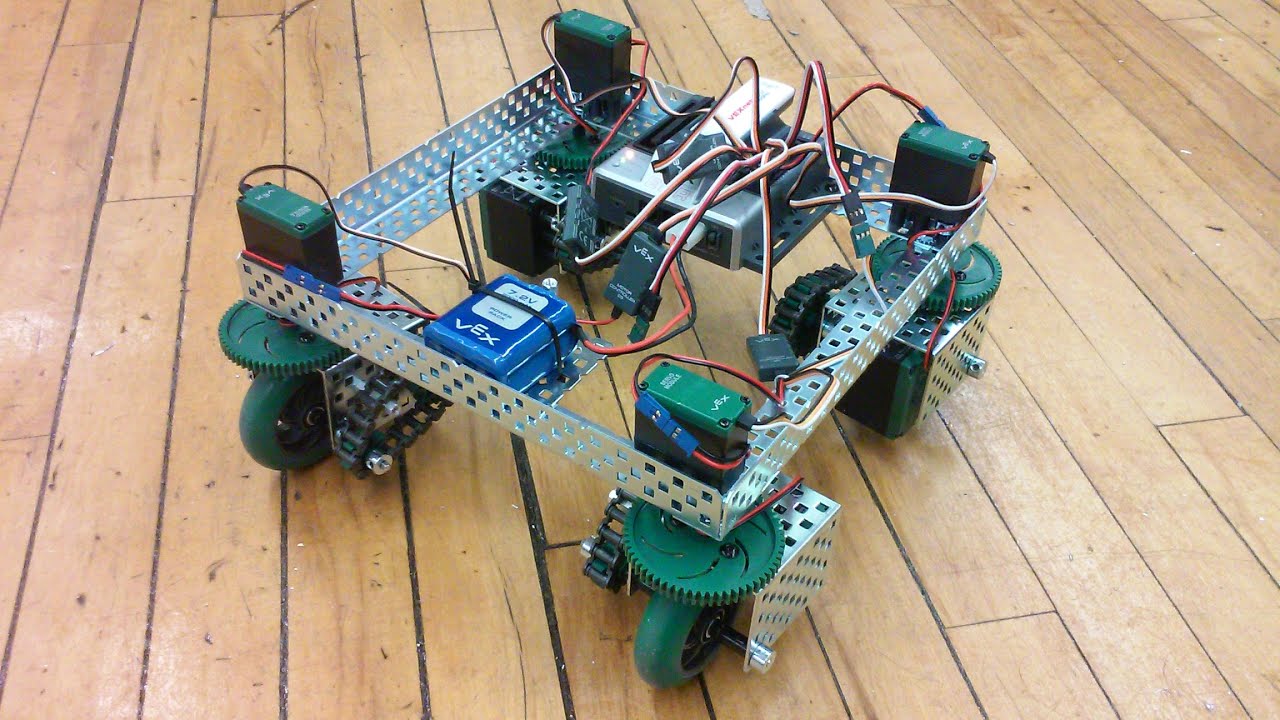
After this was posted, I was asked by Kyle | 81818X to mention that swerve drives have the ability to provide the robot’s full torque force in any applicable direction (given that the wheels have 360 degrees of motion)
(Above: Differential Swerve Drive by Kyle from team 81818X)
Obviously the linked CAD model of Kyle’s differential swerve now seems tempting to you. You’re probably thinking you have the gears and the metal and you probably do. It doesn’t look terribly hard to build. But such a drive is A) alot harder to build than it looks and B) is likely to have serious friction problems without any sort of lubrication and C) if both sides are not build perfectly it simply isn’t going to drive straight without a mechanical or programmed jerry-rigged solution. Not exactly ideal.
Might I also note that swerve drives are typically considered because they allow for increased accuracy while turning, as well as variable speed and torque? Omni wheels, when used properly (and they are used by most teams you’ll see at Worlds), will allow any robot to pretty much turn on a dime. And while there are arguments for variable speed and torque, those things can be somewhat achieved using A) programming or B) gearing.
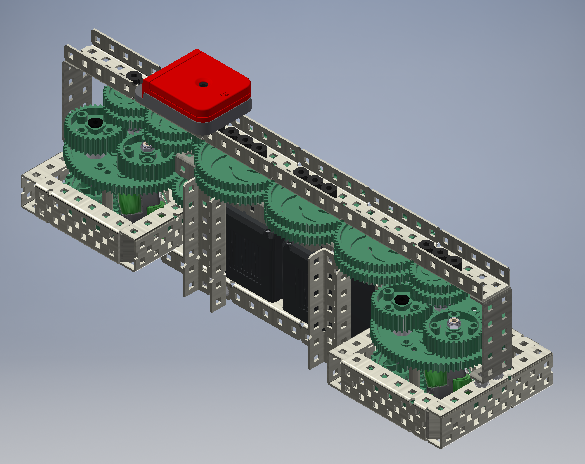
(Above: Not sure who made this)
Which brings me to the final discussed topic, X-Drives, Holonomic Drives, “Bendy Drives”, whatever. Every year there is always a debate about using an x-drive versus a tank drive, and I’m sure a quick search on the forum will yield plenty of information regarding the topic. X drives utilize 4 omni-wheels positioned at a 45* angle to the robot’s side profile to allow the robot to strafe and move at an increased speed than tank drives. (https://aura.org.nz/why-is-x-drive-faster/ for more information on this property.) X-drives can use four motors (and there are many VexU robots that utilized 8-motor x-drives as well), and are quite simple to build compared to a swerve or swerve differential (though tank drive is still the simplest option). X drives may retain slight friction issues due to construction, but when built properly, they do serve as an excellent option for teams looking for more speed and maneuverability.
TL;DR - Stop starting drama and act like adults. You all should be mature enough to help people with their questions.
Swerve drives can grant variable speed and torque, at a massively increased motor cost, robot complexity, and additional programming challenges. Most people would say to look at other drive options.
Omni wheels are a great substitute for the turning capabilities of a swerve drive without any of the complexity. They’re used by most teams you’ll see at state, national, and Worlds competitions.
-X/Holonomic/“Bendy” drives use 4 omni wheels positioned at a 45 angle to allow a robot to strafe and move at a higher speed than a tank drive. They are an excellent option for teams looking for more speed and maneuverability, but there will always be an annual debate about their viability compared to a typical tank drive.