I mean you could use pistons to gear shift
And make it ratcheted so it dosent spin the discs out when you drive backwards.
Ratcheted pneumatic transmission
You could build one on each side of the wheelbase or on one side with a differential (if you build it on one side it will drift when the intake is on).

well yes, of course we’ll be finding a solution. Not right now though, currently I have a project due tomorrow (programming is multi organ failure as I have said in the past) + two tests to study for on Tuesday. I’ll get back to the forums with any ideas we have.
how is this a flaw?
your not going to bring in discs from a intake that’s in the front when going reverse
and with 6 motor you could ratchet the intake so it only goes forward
I think the problem (what @242EProgrammer was trying to point out) is say you’re going forward, barely intake the disk, and immediately back away. Since the disk is still in the intake and hasn’t reached the indexer yet, it’ll just fall out.
See this trajectory:
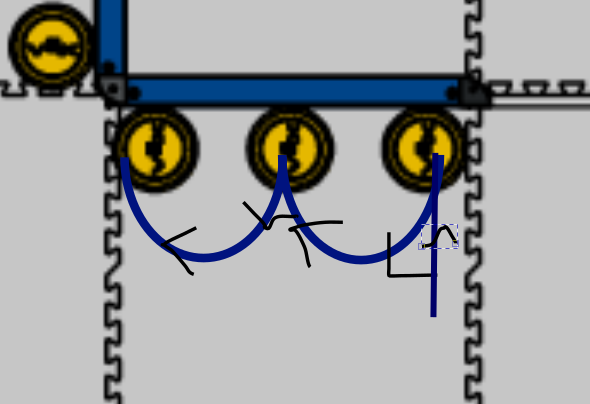
Ratchets should solve this problem in most patterns of driving.
roller double intake
Weird question: is mecanum better then x drive? Is x drive better then mecanum? I find it weird that a 4 pack of wheels are 65 bucks. I do not want to spend that money if it is not necessary. I am used to tank driving, so for that reason I think mecanum might be better, but I wanted to ask why.
Is a cat better than a dog? Is a dog better than a cat? Personal preference.
Both X-drive and Mecanum provide holonomic movement. X-Drive chassis are more difficult to build (e.g. you’ll likely need angle gussets) but the omni wheels they use are lighter.
Mecanum wheels are not as easy to manufacture as traction or omni wheels, so not surprising they are more expensive.
Why do you want to try a holonomic drive? Being “used” to “tank driving” won’t make a Mecanum robot any easier to drive than an X-Drive. The controls for holonomic drives (both Mecanum and X-Drive) are common.
im not sure but i think mecanum has more torque, but x drive is faster
also programming a x-drive and mecanum are the exact same
Basically, my team and I want a chassis that will make it easier to maneuver around, and be able to strafe, while using 4 motors only. X drive and holonomic are the 2 main types of designs that can do that, so I want to know if one works better then the other or if there is a reason to do a mecanum rather then a holonomic.
I have one question. Is there any easier alternative to odometry?
My team is not very experienced and we probably cant do odometry
A holonomic drive is any kind of drive that can strafe. An X-drive is a holonomic drive.
thought about it a little more, just make a box bot. have the bare minimum to pass inspection, at the end of the match have it expand to cover as many tiles as possible. Bonus points if you add a shooter so you can really carry for your team
Not really a wierd question - you will probably find better answers using the search function than you will asking this in a thread about the overall game meta-strategy.
I don’t know much about vex. Are flywheel launchers/flex wheel launchers easy to make? Are they just motors and wheels that launch a disc?
Check out the Purdue Sigbot Wiki - Flywheel - BLRS Wiki.
I also recommend finding their RI2D reveal video.
I mean, sure, the GPS sensor is an easy way out of having to develop an odometry system. But it’s high cost and only guarantee compatibility with skills fields (GPS strips are only mandated to be used on skills fields) mean that it would almost certainly be better if y’all went through the process of developing an odometry system. There are many resources on this forum and the various VEX related discord servers to help y’all on your journey.
What is that crazy sawtooth cut on the bottom and how did they ever pass inspection at any event?
My club nicknamed it “the knife”. They eventually replaced it and hence passed inspection.